
Многоканальные системы сбора данных широко применяются в промышленности и медицине, в устройствах контроля и управления.
Множество датчиков подключается к АЦП через оптические и проводные линии связи, причем преобразователи должны синхронно кодировать сигналы этих датчиков. Применение в системах
сбора данных преобразователей с мультиплексорами на входе позволяет уменьшить количество
используемых АЦП и тем самым снизить стоимость, энергопотребление и размеры проектируемого изделия в целом. Использование в таких системах АЦП поразрядного уравновешивания дает возможность кодировать сигналы с минимальной задержкой, при этом такие АЦП имеют малое потребление и минимальные размеры. В настоящей публикации рассмотрены особенности систем сбора данных, выполненных на основе прецизионных АЦП поразрядного уравновешивания.
В состав многоканальных систем сбора данных должен быть включен усилитель-драйвер, имеющий малое время установления при максимальном входном сигнале. Переключение каналов следует синхронизировать с циклом преобразования АЦП. Структурная схема рассматриваемой системы сбора данных приведена на рис. 1.
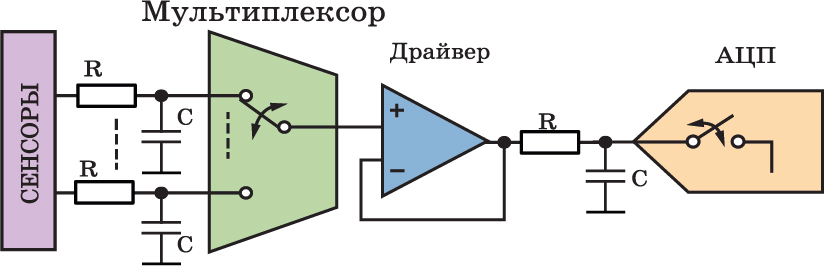
Рис. 1. Структурная схема системы сбора данных
Для обеспечения высокой точности рассматриваемой системы время переключения и полоса пропускания мультиплексора должны выбираться исходя из параметров сигналов датчиков. Задержка включения/выключения мультиплексора должна обеспечивать прохождение сигнала с выхода датчика на вход АЦП с минимальной потерей точности. Провалы напряжения при переключении каналов мультиплексора также не должны влиять на точность передачи сигналов датчиков к АЦП.
Для уменьшения выбросов напряжения при переключении сигналов большой амплитуды рекомендуется на выходах мультиплексора включать конденсаторы большой емкости, как показано на рис. 2.
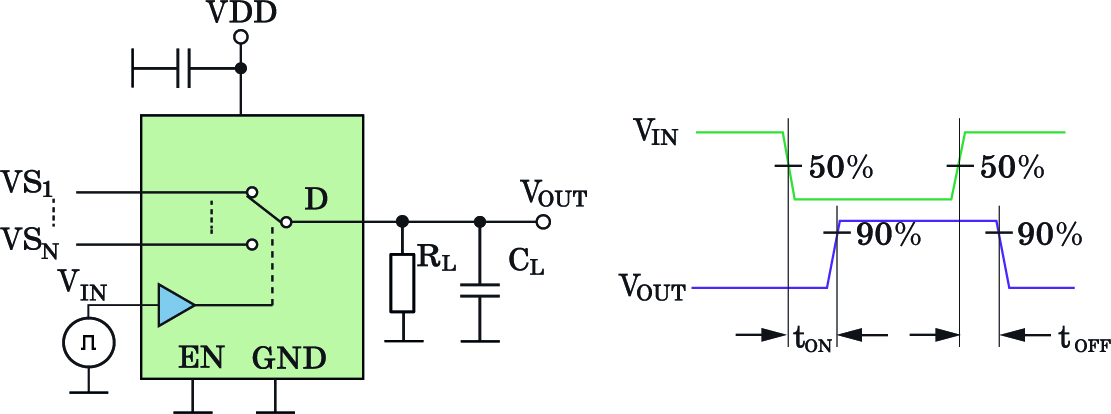
Рис. 2. Структурная схема мультиплексора (а) и временные диаграммы его работы (б)
Особые требования в таких системах предъявляются к драйверу на входе АЦП. Он должен отрабатывать скачки напряжения на входе, для чего должен иметь максимальную скорость нарастания и минимальное время установления выходного сигнала. Типовые временные диаграммы работы системы сбора данных (рис. 1) при кодировании сигналов с размахом полной шкалы АЦП приведены на рис. 3.
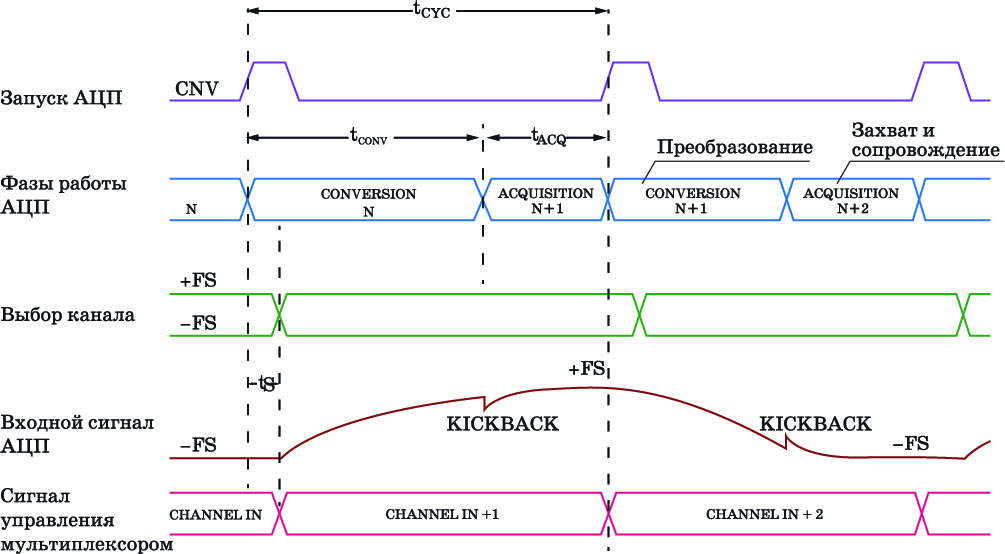
Рис. 3. Временные диаграммы работы системы сбора данных
Для уменьшения паразитных выбросов и защиты от наложения спектров на входе АЦП включают фильтр нижних частот. Величина сопротивления последовательно включенного резистора фильтра должна быть такой, чтобы поддерживать устойчивую работу усилителя драйвера.
На рис. 4 приведена упрощенная функциональная схема многоканальной системы сбора данных. Аналоговый коммутатор (мультиплексор) ADG774 выполнен по КМОП технологии и может коммутировать как симметричные, так и несимметричные сигналы положительной или отрицательной полярности.
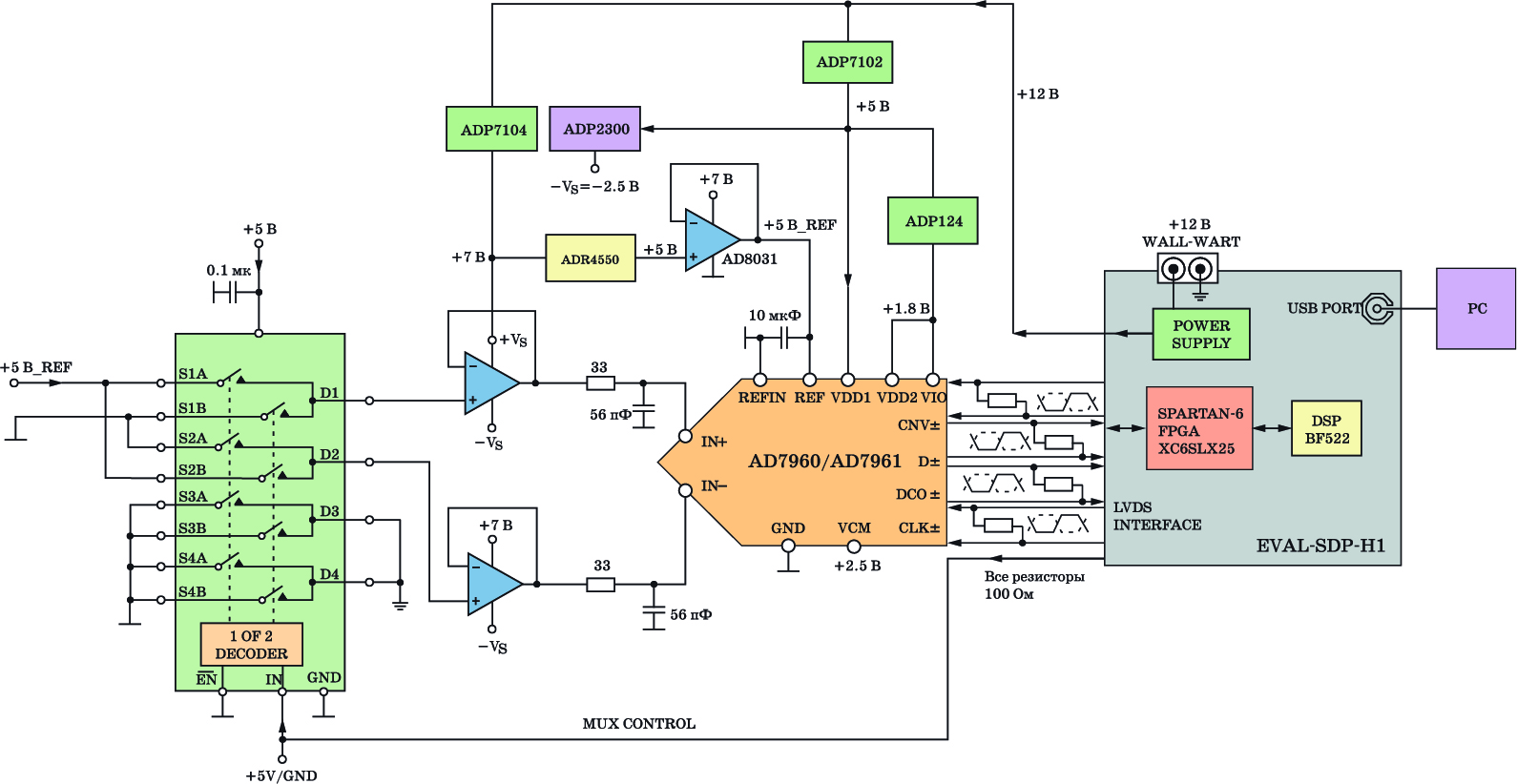
Рис. 4. Функциональная схема системы сбора данных
Усилитель-драйвер выполнен на основе ОУ ADA4899-1, отличающимся малыми искажениями входного сигнала. АЦП AD7960 семейства PulSAR имеет точность 18 бит и частоту выборки 5 МГц. Фильтр на входе АЦП позволяет уменьшить амплитуду паразитных выбросов в процеcсе поразрядного уравновешивания входного сигнала. Время коммутации мультиплексора ton/toff составляет 7/4 нс. Сопротивление замкнутого канала не превышает 2.2 Ом, полоса пропускания составляет 240 МГц, рассеиваемая мощность не превышает 5 мВт.
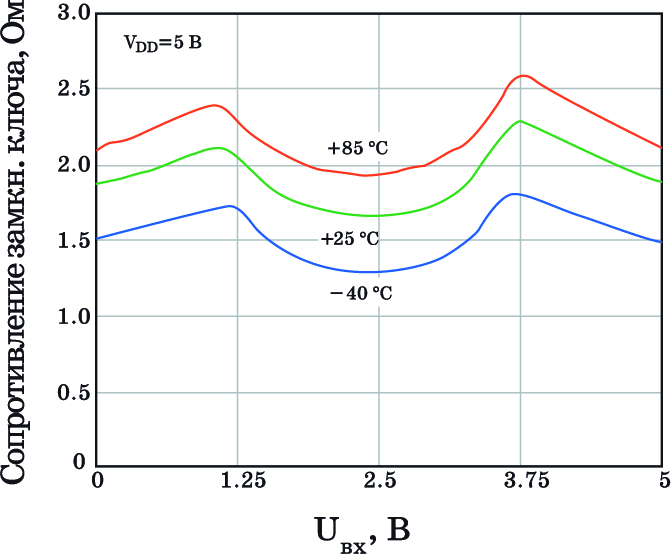
Рис. 5. Зависимость сопротивления замкнутого ключа мультиплексора от напряжения на входе и от температуры окружающей среды
На рис. 5 приведена зависимость сопротивления замкнутого канала мультиплексора от величины входного напряжения в диапазоне от 0 до 5 В при разных значениях температуры окружающей среды. Спектральная плотность входного шума усилителя-драйвера ADA4899-1 составляет 1 нВ/√Гц, уровень нелинейных искажений -117 дБ, полоса пропускания 600 МГц, скорость нарастания выходного напряжения 310 В/мкс. Широкий диапазон напряжений питания усилителя – от 2.5 до 7 В, позволяет обеспечить оптимальный режим работы усилителя. Время установления выходного сигнала усилителя амплитудой 2 В с погрешностью не более 0.1% составляет 50 нс (рис. 6).
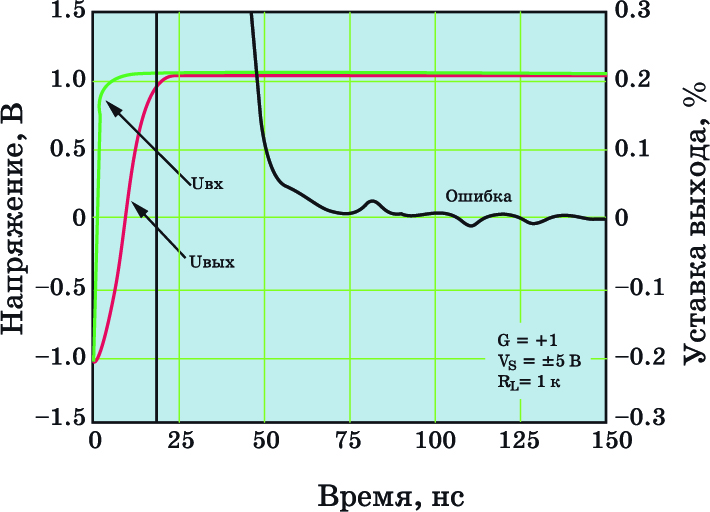
Рис. 6. Типовое время установления выходного сигнала ADA4899-1
Прецизионный АЦП поразрядного уравновешивания с дифференциальным входом AD7960 имеет разрешение 18 бит. Его интегральная нелинейность составляет ±0.8ЕМР, отношение сигнал/шум 99 дБ, нелинейные искажения -117 дБ. Максимальная частота выборки этого АЦП 5 МГц. При такой частоте выборки мощность рассеяния преобразователя не превышает 47 мВт. Отметим, что напряжения питания АЦП AD7960 5 и 1.8 В формируются линейными LDO-стабилизаторами ADP710 и ADP124 соответственно.
Для формирования опорного напряжения АЦП используется внешний опорный источник ADR4550 напряжением 5 В, погрешность которого не превышает ±0.02%, а потребляемый ток – 950 мкА. В качестве буферного каскада опорного источника используется усилитель AD8031, который обеспечивает устойчивую работу цепи опорного напряжения при большой емкостной нагрузке. Цифровой интерфейс AD7960 выполнен на основе LVDS-логики.
Если обработка данных осуществляется по одному каналу, максимальная частота выборки системы сбора и обработки данных составляет 5 МГц, причем будет обеспечена точность не менее 14 разрядов. При организации многоканальной обработки данных погрешность системы определяется заданной производительностью. При этом минимальная погрешность, вызванная перекрестной помехой, как следует из рис. 7, составляет 0.01%. Зависимость погрешности систем сбора данных от величины входного сигнала приведена на рис. 8, причем минимальная величина погрешности, вызванной перекрестной помехой, не превышает 0.01% при амплитуде входного сигнала, составляющей 10% от максимального значения.
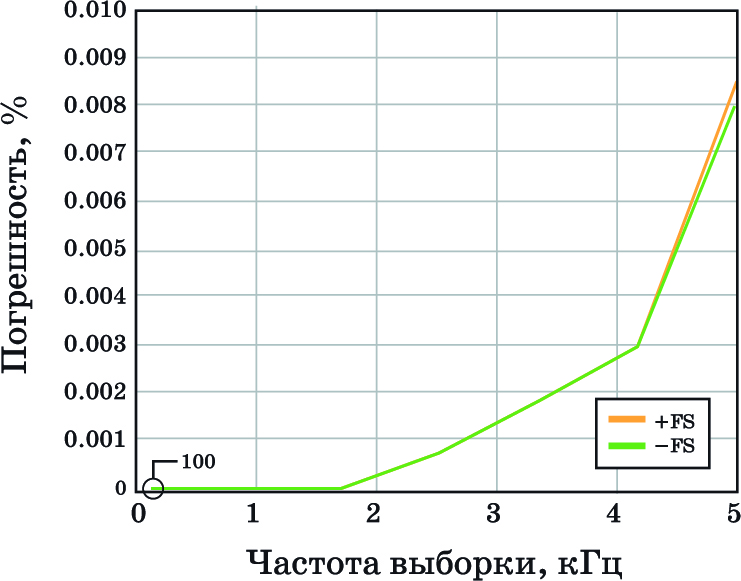
Рис. 7. Зависимость погрешности, вызванной перекрестной помехой, от частоты выборки АЦП

Рис. 8. Зависимость погрешности, вызванной перекрестной помехой, от величины дифференциального входного сигнала и его скачка
Учитывая малые габариты системы сбора данных и высокую тактовую частоту, необходимо обеспечивать тщательную разводку печатной платы. Пример такой платы размерами 69×85 мм приведен на рис. 9. Шины питания АЦП и опорных сигналов при проектировании такой платы должны быть разнесены. Развязывающие конденсаторы должны быть расположены в непосредственной близости от ИМС АЦП. Шины земли, питания и тактовых сигналов должны быть разнесены с шинами входных аналоговых сигналов.
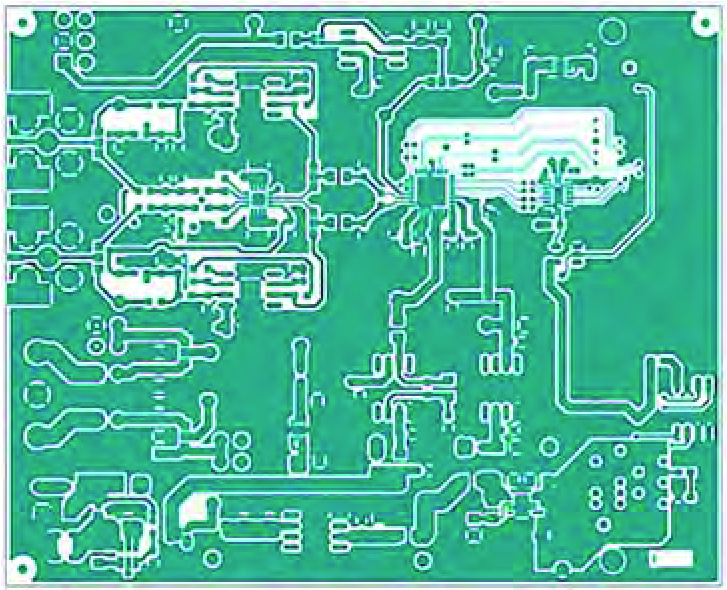
Рис. 9. Топология печатной платы системы сбора данных
ВЫВОДЫ:
1. Миниатюрные многоканальные системы сбора данных с малым потреблением находят широкое применение в промышленности и медицинском приборостроении.
2. Реализация таких систем может быть выполнена на основе ИМС компании Analog Devices, таких как многоканальные мультиплексоры, прецизионные усилители и АЦП, опорные источники и др.