
Резкие изменения погодных условий, техногенные катастрофы, вирусные и бактериальные заболевания сельскохозяйственных культур привели к необходимости разработки и создания сенсоров для экспресс-диагностики состояния растений в реальном времени и определения влияния на растительный покров климатических факторов, вирусных и бактериальных нагрузок, а также стрессовых факторов природного и техногенного происхождения. Получение оперативной и объективной информации о состоянии растений позволяет своевременно выработать меры по защите сельскохозяйственных культур, лесопарковых растений, зеленого покрова мегаполисов. Это позволит снизить материальные затраты по защите окружающей среды, сберечь зеленые насаждения от возможных потерь, а также способствовать защите лесных массивов и парков от вирусной и бактериальной инфекции.
В Институте кибернетики имени В.М. Глушкова НАН Украины в рамках международного проекта УНТЦ № 6064 разработана беспроводная сенсорная сеть, рис. 1, которая на нижнем уровне включает беспроводный интеллектуальные сенсоры, координатор и концентратор. Данные беспроводной сети поступают в мобильную беспилотную платформу, а далее в удаленный компьютер, или обрабатываются облачными технологиями.
К интеллектуальному беспроводному сенсору предъявлялись следующие требования:
• возможность работы в полевых условиях эксплуатации
• длительное время работы без замены или подзарядки аккумулятора
• невысокая стоимость
• небольшие масса и габариты
• возможность самокалибровки основных узлов
• высокая надежность
• оптимальное соотношение дальности передачи данных к потребляемой энергии
• возможность замены или подзарядки аккумулятора в полевых условиях.
Исходя из этих требований, была разработана следующая структура сенсора, рис. 2. Беспроводной микроконтроллер сенсора предназначен для управления работой сенсора, передачи и приема данных и обеспечения взаимодействия сенсора с другими узлами сети, рис. 1. Сенсор включает встроенный аккумулятор, наличие которого предусматривает его безопасную подзарядку и защиту от неправильного подключения. Для этого в схему сенсора включены схема защиты и микросхема заряда для подзарядки литий-полимерного аккумулятора. Узел microUSB-разъем обеспечивает стандартное сопряжение с источником внешнего питания. Для преобразования напряжения аккумулятора в уровни, необходимые для питания узлов сенсора, используется линейный стабилизатор LDO 3.3 B и импульсный стабилизатор DC/DC 3.3 B. ФНЧ кроме ослабления пульсаций управляет драйвером светодиода, формирующим ток синего светодиода. Синий светодиод возбуждает соответствующие реакционные центры листка живого растения. Фотодетектор измеряет отклик возбужденных реакционных центров листка в красной области спектра. Учитывая, что беспроводной интеллектуальный сенсор разработан для использования в системах экологического мониторинга и защиты растений в сельском хозяйстве, лесоводстве, заповедниках и мегаполисах, он имеет следующие особенности:
• определяет степень загрязнения тяжелыми металлами, пестицидами и гербицидами почвы и воды
• оценивает жизнеспособность растений после засухи, жары, заморозков, внесения пестицидов и гербицидов
• в экспрессном режиме определяет необходимые дозы удобрений и биологических добавок.
Внешний вид беспроводного интеллектуального сенсора приведен на рис. 3.
Условия эксплуатации сенсора:
• температура окружающего воздуха от 5 до 45 °С
• относительная влажность воздухза до 95 % при температуре 25 °С
• атмосферное давление от 84 до 107 кПА (от 630 до 800 мм рт.ст.).
Технические параметры сенсора:
• масса не более 0.03 кг
• габариты 87×28×20 мм
• максимальный уровень облучения листка живого растения 200 клк
• интенсивность облучения регулируется координатором в диапазоне от 50 до 200 клк
• спектр волны облучения 460–480 нм
• спектр фотоприемника сенсора на уровне 0,5 находится в диапазоне 680–930 нм • площадь поверхности листка, которая подвержена облучению, составляет 100 мм2 и может бать увеличена по желанию пользователя.
Кроме того, сенсор имеет следующие дополнительные возможности:
• возможность самокалибровки
• возможность контроля параметров под управлением координатора
• возможность измерения текущего уровня заряда аккумулятора
• возможность контроля и регулировки интенсивности облучения листка растения.
Параметры питания сенсора:
• сенсор включает литий-полимерный аккумулятор емкостью 200 мАч
• максимальный ток потребления 50 мА
• заряд аккумулятора осуществляется от внешнего источника питания напряжением от 4,3 до 6 В через разъем типа «microUSB»
• ток заряда аккумулятора – 75 мА
• время заряда аккумулятора до уровня 95% около 2 ч.
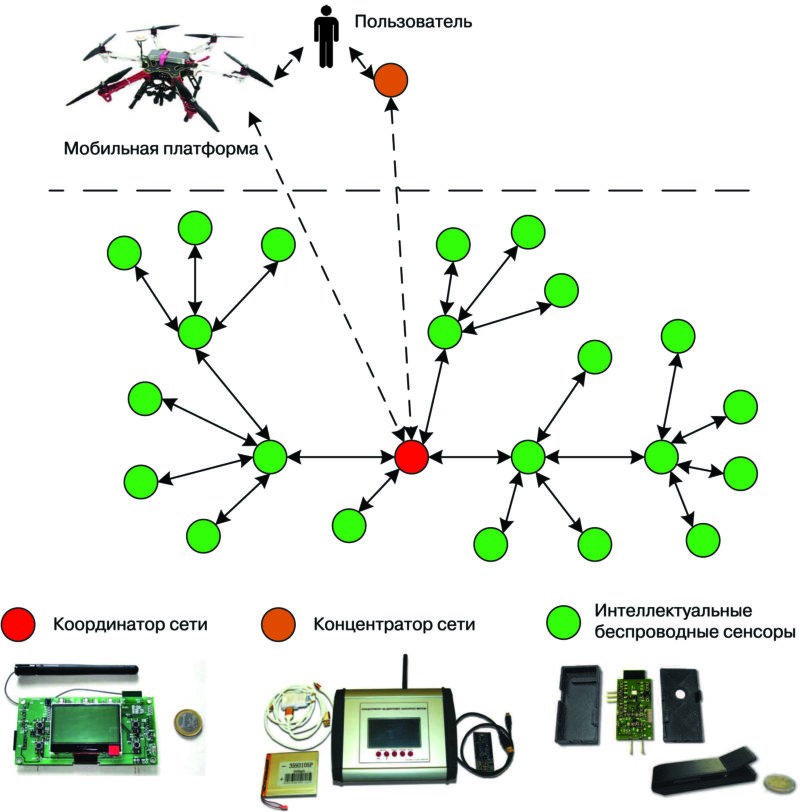
Рис. 1. Структура беспроводной сенсорной сети
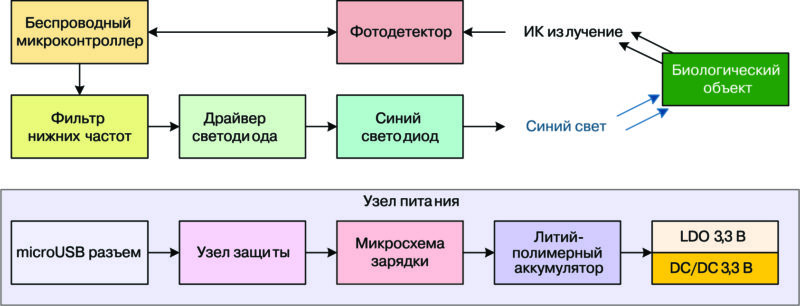
Рис. 2. Структура интеллектуального беспроводного сенсора
Режимы работы сенсора:
• время измерения индукции флуоресценции хлорофилла 1 с, 10 с, 4 минуты (может бать установлено пользователем).
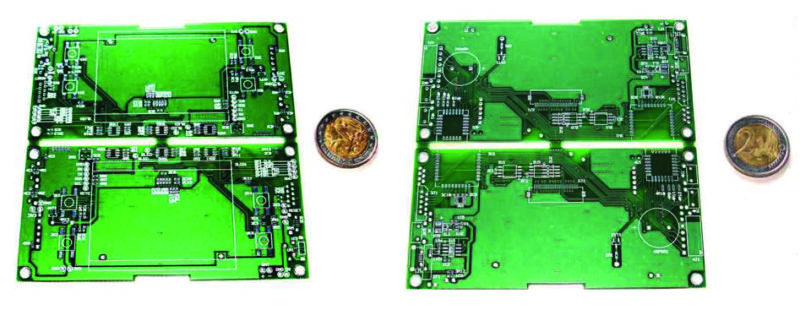
Координатор беспроводной сенсорной сети предназначен для сбора данных, передаваемых сенсорами, их хранения и подготовки для передачи в концентратор, мобильную платформу или удаленный компьютер. Кроме того, координатор обеспечивает организацию работы сети сенсоров, проверяет ее работоспособность, устраняет конфликтные ситуации при одновременной передаче данных несколькими сенсорами, управляет работой сети в целом и информирует пользователя о работоспособности отдельных сенсоров и сети в целом. Структура координатора приведена на рис. 4. На контрактном производстве компании VD MAIS были изготовлены и собраны печатвне платы координатора, рис. 5, в соответствии с требованиями стандарта IPC-A-600H. Внешний вид координатора сети беспроводных сенсоров приведен на рис. 6.
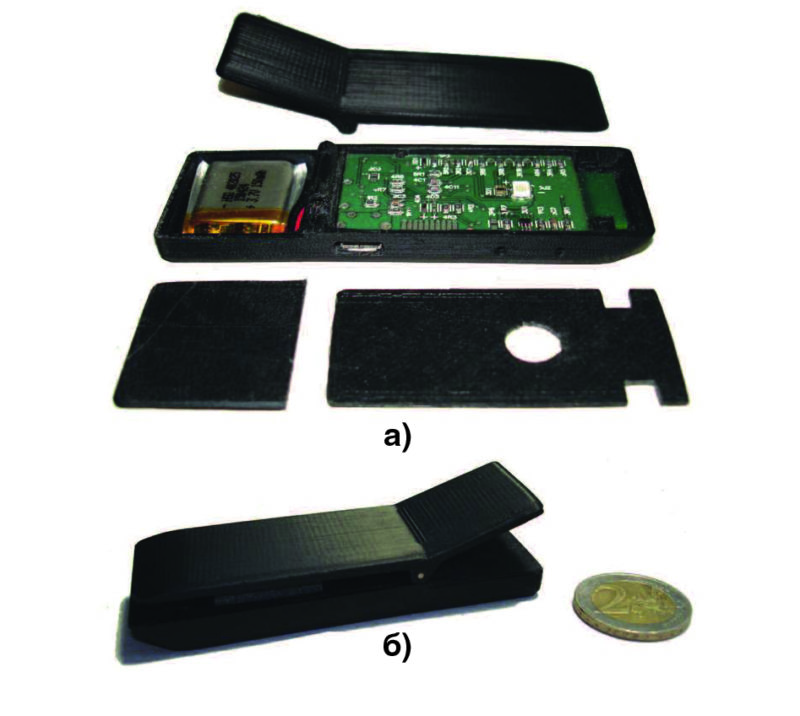
Рис. 3. Беспроводный интеллектуальный
сенсор в разобранном (а) и собранном (б) виде

Рис. 4. Структура координатора интеллектуальной
беспроводной сенсорной сети
Концентратор беспроводной сенсорной сети представляет собой специализированный компьютер с радиоканалом, предназначенный для работы в полевых условиях эксплуатации. Структурная схема концентратора приведена на рис. 7.
а) б)
Рис. 5. Фотография верхнего (а) и нижнего (б)
слоев печатной платы координатора
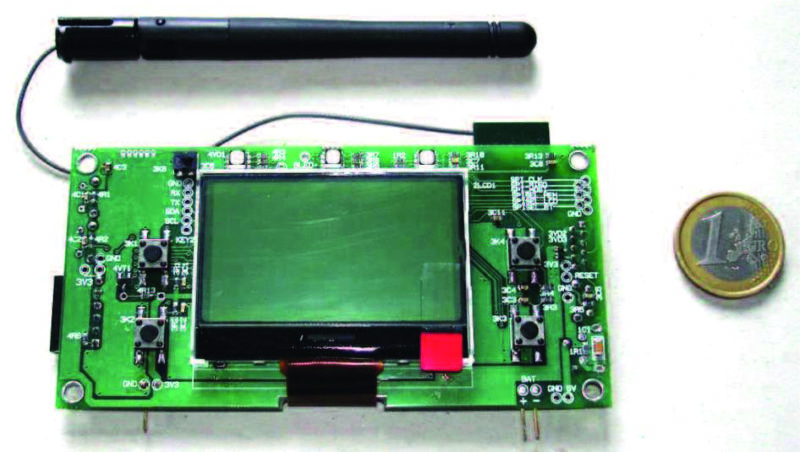
Рис. 6. Внешний вид координатора
Основным узлом концентратора является микроконтроллер, который выполнен на микросхеме
LPC4357 фирмы NXP и обеспечивает сбор, обработку, накопление и визуализацию данных измерений индукции флуоресценции хлорофилла, приема и передачи в удаленный компьютер служебной информации о состоянии сенсоров и сети в целом. Узел приема-передачи данных выполнен на основе экономичного микроконтроллера JN5168 компании NXP. Узел отладки типа LPC-Link2 представляет собой универсальное автономное устройство отладки, которое подключается к микроконтроллеру и имеет широкий набор инструментальных функций, включая функции программирования и перепрограммирования микроконтроллерного узла. Концентратор построен по модульному принципу. При его изготовлении использован металлический профиль Alu-Topline модель ATPH 1850-0200 с габаритными размерами 181.2×53.2×200 мм. Внешний вид концентратора с набором аксессуаров приведен на рис. 8, внутренние узлы концентратора приведены на рис. 9.
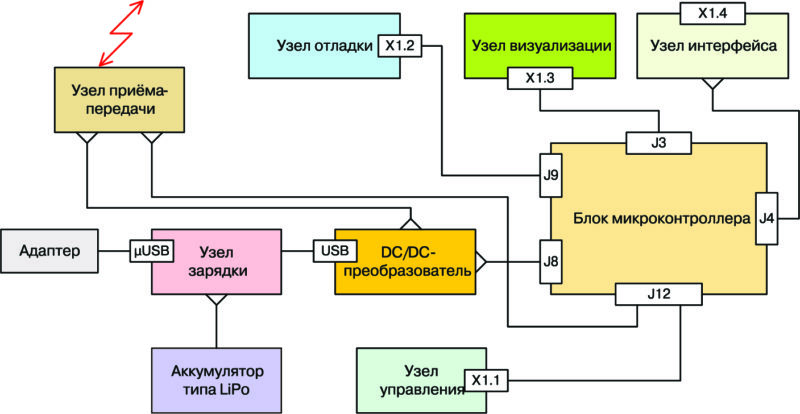
Рис. 7. Структурная схема концентратора сети интеллектуальных беспроводных сенсоров
В соответствии с разработанными аппаратными средствами было разработано прикладное ПО (в виде программных модулей) для организации и поддержания их работы. Структура ПО и взаимодействие отдельных программных модулей представлено на рис. 10.

Рис. 8. Концентратор беспроводной сенсорной сети
После изготовления беспроводной сенсорной сети она была протестирована как на моделях, так и в условиях, приближенных к реальным. В частности, было проведено тестирование сети на надежность передачи данных. Тестирование проводилось для разных условий применения, т.е. для открытой местности (присутствует прямая видимость между источником и приемником сигнала), местности с невысокой растительностью (почти всегда присутствует прямая видимость), местности с густой растительностью (прямая видимость частично отсутствует) и для местности с большим числом строений (прямая видимость практически отсутствует). Коэффициент надежности связи рассчитывался как отношение числа отправленных сообщений к числу полученных.
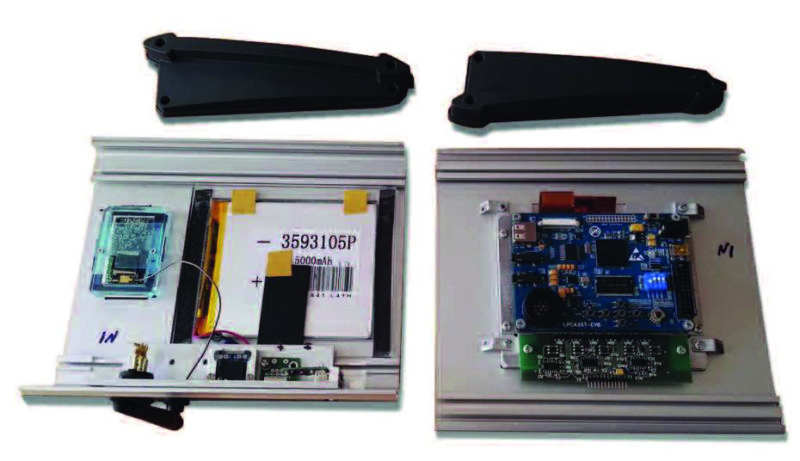
Рис. 9. Основные узлы концентратора
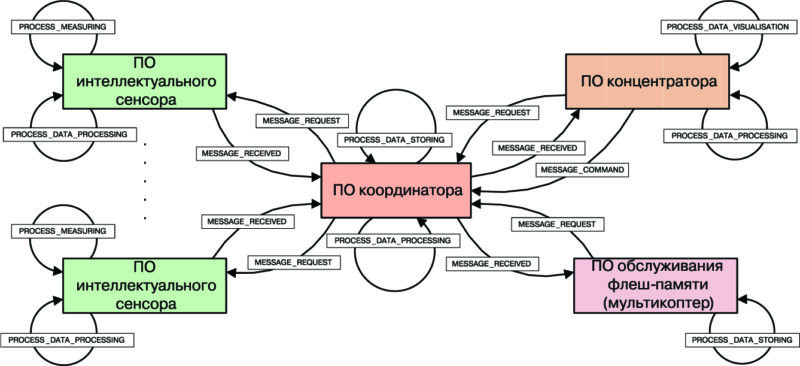
Рис. 10. Структура ПО беспроводной сенсорной сети
После изготовления беспроводной сенсорной сети она была протестирована как на моделях, так и в условиях, приближенных к реальным. В частности, было проведено тестирование сети на надежность передачи данных. Тестирование проводилось для разных условий применения, т.е. для открытой местности (присутствует прямая видимость между источником и приемником сигнала), местности с невысокой растительностью (почти всегда присутствует прямая видимость), местности с густой растительностью (прямая видимость частично отсутствует) и для местности с большим числом строений (прямая видимость практически отсутствует). Коэффициент надежности связи рассчитывался как отношение числа отправленных сообщений к числу полученных.
По результатам тестирования построены графики зависимостей качества передачи данных от сенсора к координатору для разных расстояний между ними и разных типов местности, приведенные на рис. 11.
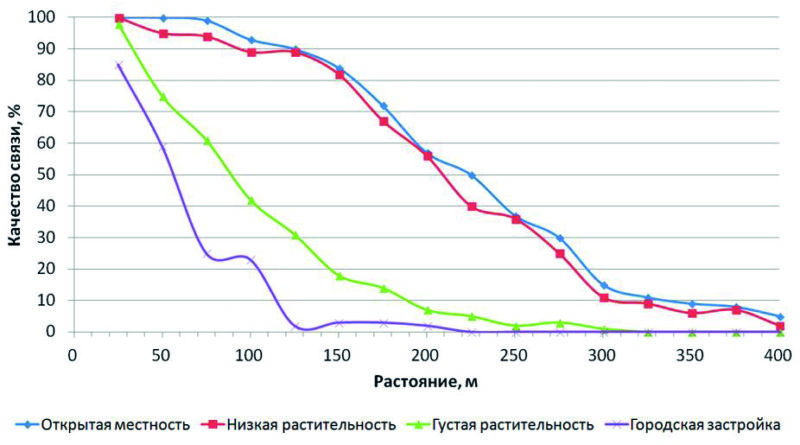
Рис. 11. Зависимости качества связи радиоканала между
сенсором и координатором от расстояния между ними
и типа местности
Из графика видно, что низкая растительность практически не влияет на качество связи. Качество связи в условиях густой растительности и построек существенно ниже, что следует учитывать при промышленном использовании разработанной сети. В качестве мобильной платформы верхнего уровня беспроводной сенсорной сети нами выбран гексакоптер на базе рамы DJI F550 с двигателем DJI 2212, рис. 12. Полетным контроллером гексакоптера является модуль DJI NAZA-M V2 с GPS-компасом.

Рис. 12. Беспилотный гексакоптер как мобильная платформа беспроводной сенсорной сети
Задание маршрута полета гексакоптера по заранее определенным GPS-точкам для сбора данных с координаторов сети осуществляется в специальной программе.
За основу радиомодуля сбора данных гексакоптера был взят радиомодуль беспроводного сенсора с некоторыми ограничениями по выполняемым функциям, причем основными функциями этого модуля были следующие:
• установление связи с заданной беспроводной сенсорной сетью при подлете гексакоптера на достаточное для поддержания надежной связи расстояние
• передача координатору сети запроса на разрешение связи
• прием от координатора данных измерений и их сохранение в памяти гексакоптера.
Внешний вид модуля приема данных гексакоптера приведен на рис. 13.
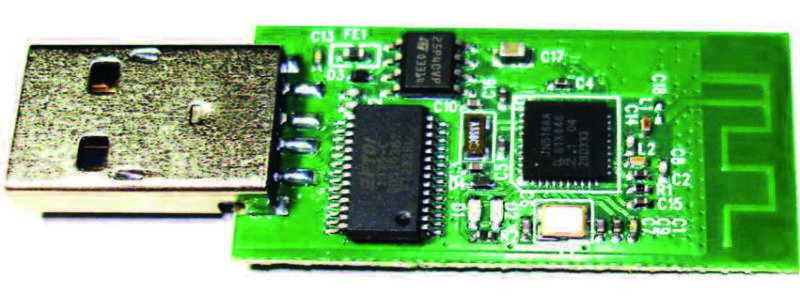
Рис. 13. Радиомодуль гексакоптера
Слева на рисунке виден USB-порт для считывания данных в компьютер, а справа находится антенна радиоприемника. Программная поддержка беспроводного сенсора, координатора и радиомодуля гексакоптера идентичны.
ВЫВОДЫ
1. Институтом кибернетики имени В.М. Глушкова НАН Украины в рамках проекта УНТЦ № 6064 разработана и доведена до серийного производства двухуровневая сеть беспроводных сенсоров, включающая собственно беспроводные сенсоры, координаторы и концентраторы сети на нижнем уровне, и мобильную платформу (беспилотный гексакоптер) на верхнем уровне.
2. Сеть беспроводных сенсоров предназначена для прецизионного земледелия, экологического мониторинга и защиты окружающей среды.
3. Разработка печатных плат и поставка элементной базы осуществлена компанией VD MAIS. Сборка основных узлов и модулей сети выполнена на контрактном производстве компании VD MAIS.