
При проектировании измерительных систем с аналоговыми узлами погрешности и шумы от различных компонентов измерительного канала необходимо суммировать и использовать для определения обобщенной погрешности. Характеристики в технической документации могут быть выражены в процентах или в абсолютных единицах, шумы и погрешности могут быть приведены к выходу или к входу. Вычисление суммарной погрешности на основе приведенных к входу шумов и погрешностей отдельных узлов измерительной системы дает важную информацию об оценке точности системы в целом.
На рис. 1 приведена обобщенная структурная схема измерительного канала.
Каждый узел может иметь несколько компонентов для выполнения измерительных операций. Каждый аналоговый каскад от датчика до АЦП вносит аналоговый шум и погрешность, искажающие измеряемый сигнал. Данные на выходе АЦП содержат оцифрованный сигнал вместе с шумом и погрешностью. Некоторые шумы и погрешности можно уменьшить с помощью калибровки, компенсации или обработки сигналов. Но те погрешности, которые устранить не удается, приводят к некоторую неопределенность истинного значения измеряемой величины на выходе. Анализ этой неопределенности позволяет установить ключевые характеристики измерительного канала, такие как точность и погрешность.
Отнесение шума и погрешности измерительного канала к входу позволяет оценить уровень внесенной измерительным каналом погрешности. Например, вычисление общего шума, отнесенного к входу (Referred to Input или RTI), дает возможность определить минимальный входной сигнал, который можно выделить из шума на выходе.
Следует отметить, что данные, полученные на выходе АЦП в результате кодирования, часто программно масштабируются для приведения кода на выходе АЦП к значению измеряемой физической величины. Если исходные данные до масштабирования включали погрешность и шум, то, следовательно, и масштабируемая величина будет включать соответствующую погрешность и шум.
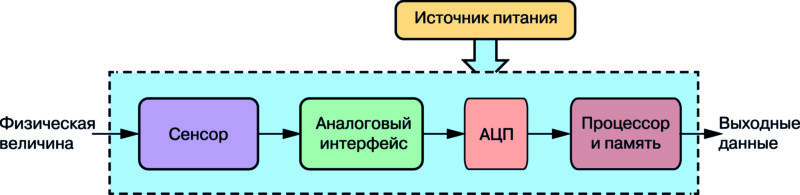
Рис. 1. Обобщенная структура измерительного канала
Для расчета общего шума измерительной системы шумы всех источников в измерительном канале должны быть приведены к входу или к выходу с использованием промежуточных коэффициентов преобразования или масштабирования. Расчет шума, приведенного к входу (RTI) или приведенного к выходу (Referred to Output или RTO), является наиболее надежным при определении точности измерительной системы.
Необходимо предварительно установить, какую точку схемы измерительного канала следует считать входом, а какую – выходом, и какие единицы измерения целесообразно использовать. Например, входными данными могут быть физические величины, выраженные, в градусах Цельсия, тогда шум RTI может быть рассчитан тоже в градусах Цельсия. Шум RTI может быть выражен в электрических единицах, таких как вольты или амперы. Точно так же выходной шум может быть определен в единицах младшего разряда АЦП или битах.
Источник шума RTI – это виртуальный источник шума, размещенный на входе, который вносит тот же шум в результат измерения, что и реальные источники шума измерительного канала. Значение шума RTI от каждого источника шума определяется путем деления величины фактического шума от этого источника на коэффициент усиление цепи от входа до выхода этого источника.
Спектральные плотности шума RTI суммируется для определения общей спектральной плотности шума измерительной системы. Точно так же шум RTO является виртуальным источником шума на выходе. Для определения шума RTO необходимо шум каждого источника умножить на коэффициент усиления цепи от входа до выхода. На рис. 2 приведены модели шумов RTI и RTO для простой измерительной цепи, состоящей из неинвертирующего усилительного каскада и фильтра нижних частот.
Между шумами, приведенными к входу и выходу (RTI и RTO), существует дисбаланс. Шум RTO – это шум после прохождения сигнала по измерительному каналу, а шум RTI – это шум на входе, который не ограничен полосой пропускания узлов сигнальной цепи. Внеполосный шум, отфильтрованный сигнальной цепочкой, в конечном итоге не влияет на результат измерения, но он проявляется в спектре приведенного к входу шума RTI. Это не означает, что шум RTI неверен.

Рис. 2. Измерительная цепь, состоящая из неинвертирующего усилительного каскада и ФНЧ
Если его значение умножить на нелинейный коэффициент усиления, зависящий от частоты конкретной сигнальной цепи, можно получить значение шума RTO. Однако цель определения шума RTI состоит в том, чтобы сравнить величину этого шума с входным сигналом. Включение внеполосного шума, который не влияет на результат измерения, не упрощает сравнение RTI шума с величиной входного сигнала.
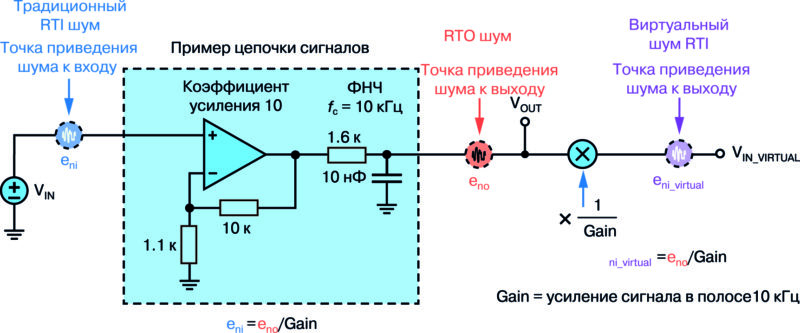
Рис. 3. Модифицированная модель шума RTI
Альтернативный подход для решения этой проблемы
Попробуем подойти к решению этой проблемы иначе. Выходной сигнал можно сравнивать с шумом RTO напрямую, поскольку этот шум учитывает шумы всей сигнальной цепи с учетом полосы пропускания каждого узла. Отсюда можно попытаться определить шум RTI так, чтобы его можно было легко сравнить с входным сигналом.
Это значит, что величину шума RTO следует разделить на коэффициент усиления сигнала всей цепи. Однако вопрос заключается в том, как определить этот коэффициент усиления. Независимо от связей по постоянному или переменному току в большинстве линейных схем коэффициент усиления, как правило, принимается постоянным в заданной полосе пропускания. В этой полосе пропускания измеряемый сигнал содержит всю необходимую информацию, которую требуется получить на выходе. Если коэффициент усиления задается для полосы пропускания, в которой он имеет постоянное значение, то шум RTO путем деления на этот коэффициент усиления можно легко преобразовать в шум RTI. Разница между данной и предыдущей моделью шума показана на рис. 3.
В альтернативной модели шум RTI влияет на величину выходного сигнала, включая спад внеполосного шума. На рис. 4 показаны промоделированные графики, показывающие различия между двумя методами определения шума RTI.
Графики входного шума RTI одинаковы для обеих моделей на низких частотах, но отличаются при спаде коэффициента усиления на высоких частотах. Традиционный шум RTI нельзя интегрировать для нахождения общего шума, тогда как виртуальный шум RTI позволяет это сделать. Коэффициент усиления сигнала можно использовать для вычисления виртуального шума RTI и обобщенного среднеквадратичного значения шума, а также для вычисления спектральной плотности шума.
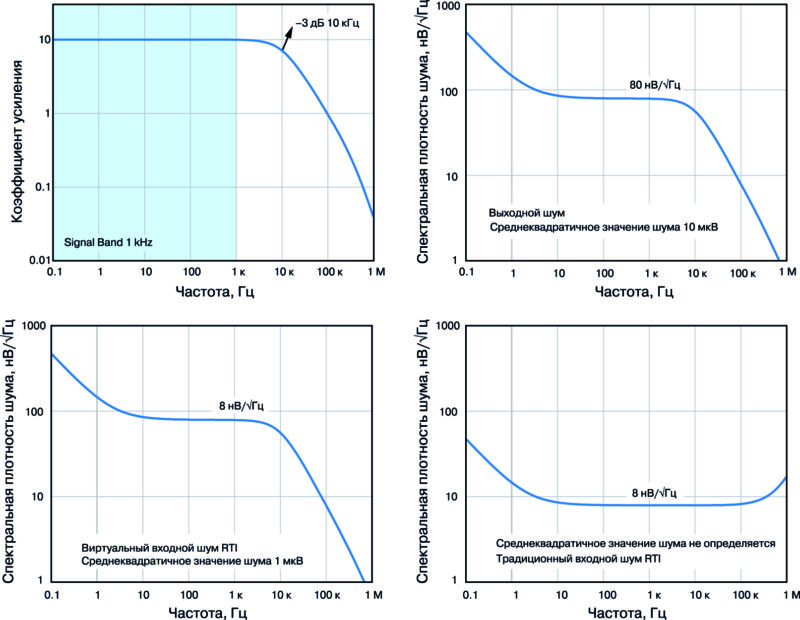
Рис. 4.Различия между двумя методами определения шума RTI.
ВЫВОДЫ
Предлагаемый метод определения приведенного к входу виртуального шума, позволяющий уточнить реальную точность прецизионной измерительной системы в заданной полосе пропускания, полученную традиционными методами расчета. Для анализа сложных схем альтернативным методом могут быть использованы такие инструменты моделирования, как LTspice и Signal Chain Noise Tool.