
Багатоканальні системи збору даних широко застосовуються в промисловості та медицині, у пристроях контролю та управління.
Безліч датчиків підключається до АЦП через оптичні та провідні лінії зв’язку, причому перетворювачі повинні синхронно кодувати сигнали цих датчиків. Застосування в системах
збору даних перетворювачів з мультиплексорами на вході дозволяє зменшити кількість
використовуваних АЦП і тим самим знизити вартість, енергоспоживання та розміри виробу, що проектується в цілому. Використання таких системах АЦП порозрядного врівноваження дає можливість кодувати сигнали з мінімальною затримкою, у своїй такі АЦП мають мале споживання і мінімальні розміри. У цій публікації розглянуто особливості систем збору даних, виконаних на основі прецизійних АЦП порозрядного врівноваження.
До складу багатоканальних систем збору даних має бути включений підсилювач-драйвер, що має короткий час встановлення при максимальному вхідному сигналі. Перемикання каналів слід синхронізувати із циклом перетворення АЦП. Структурна схема аналізованої системи збору даних наведено на рис. 1.
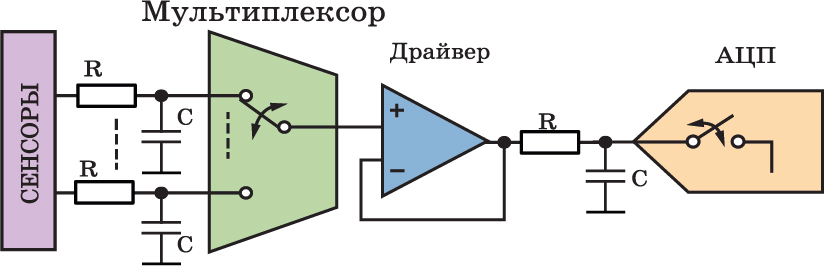
Мал. 1. Структурна схема системи збирання даних
Для обеспечения высокой точности рассматриваемой системы время переключения и полоса пропускания мультиплексора должны выбираться исходя из параметров сигналов датчиков. Задержка включения/выключения мультиплексора должна обеспечивать прохождение сигнала с выхода датчика на вход АЦП с минимальной потерей точности. Провалы напряжения при переключении каналов мультиплексора также не должны влиять на точность передачи сигналов датчиков к АЦП.
Для уменьшения выбросов напряжения при переключении сигналов большой амплитуды рекомендуется на выходах мультиплексора включать конденсаторы большой емкости, как показано на рис. 2.
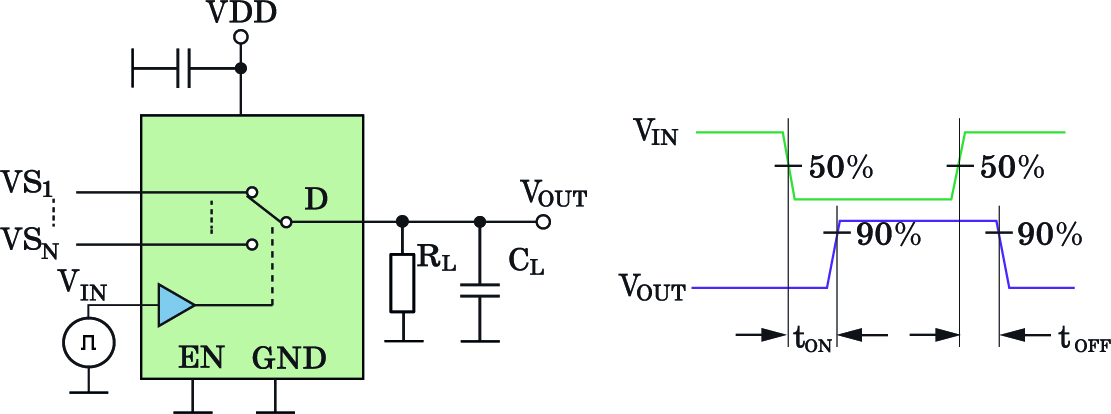
Рис. 2. Структурная схема мультиплексора (а) и временные диаграммы его работы (б)
Особые требования в таких системах предъявляются к драйверу на входе АЦП. Он должен отрабатывать скачки напряжения на входе, для чего должен иметь максимальную скорость нарастания и минимальное время установления выходного сигнала. Типовые временные диаграммы работы системы сбора данных (рис. 1) при кодировании сигналов с размахом полной шкалы АЦП приведены на рис. 3.
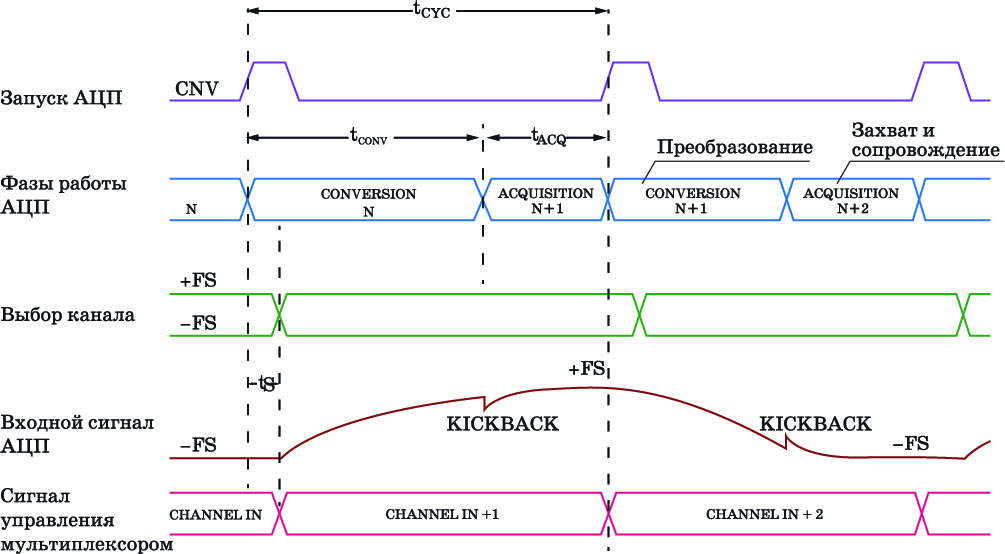
Рис. 3. Временные диаграммы работы системы сбора данных
Для уменьшения паразитных выбросов и защиты от наложения спектров на входе АЦП включают фильтр нижних частот. Величина сопротивления последовательно включенного резистора фильтра должна быть такой, чтобы поддерживать устойчивую работу усилителя драйвера.
На рис. 4 приведена упрощенная функциональная схема многоканальной системы сбора данных. Аналоговый коммутатор (мультиплексор) ADG774 выполнен по КМОП технологии и может коммутировать как симметричные, так и несимметричные сигналы положительной или отрицательной полярности.
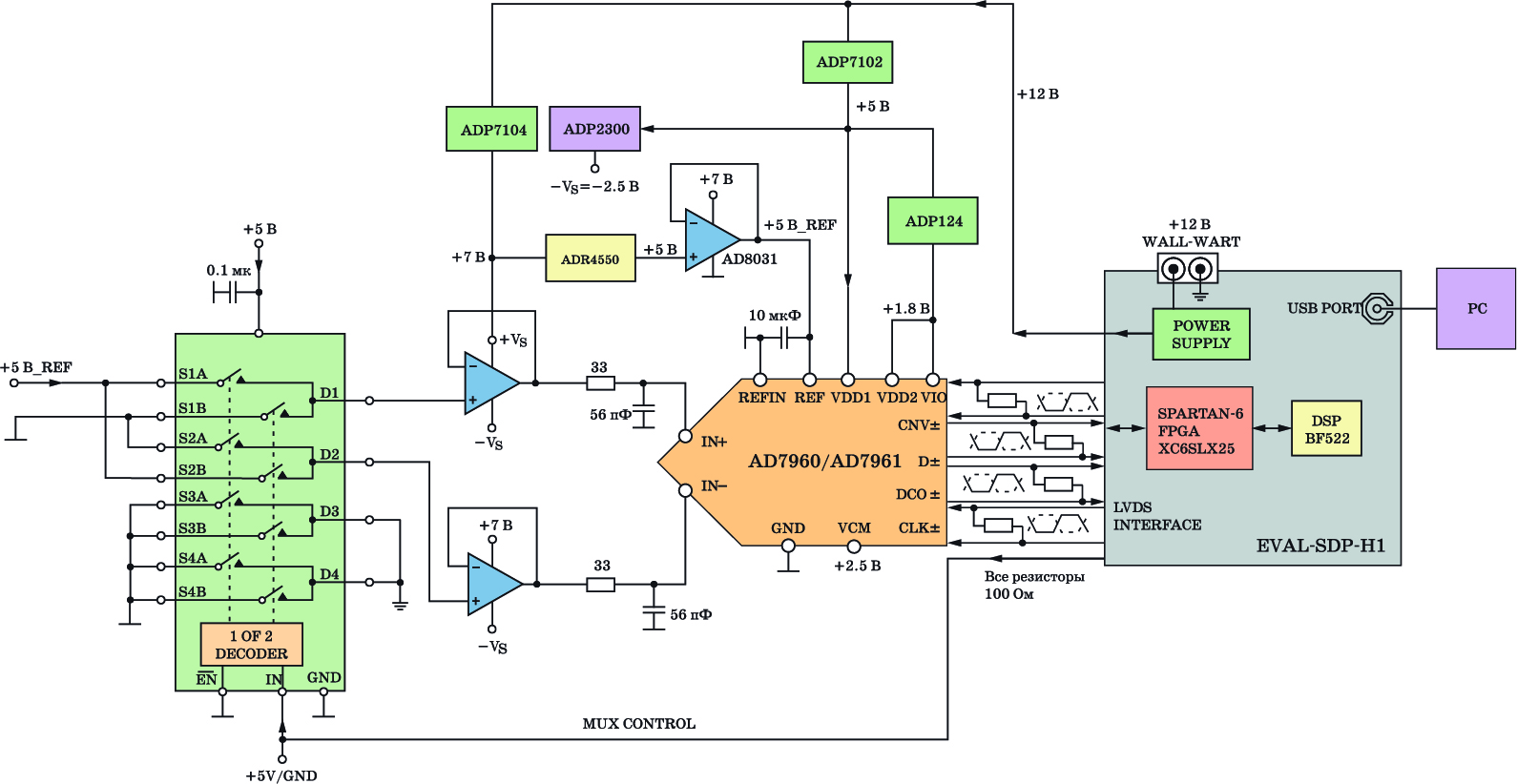
Рис. 4. Функциональная схема системы сбора данных
Усилитель-драйвер выполнен на основе ОУ ADA4899-1, отличающимся малыми искажениями входного сигнала. АЦП AD7960 семейства PulSAR имеет точность 18 бит и частоту выборки 5 МГц. Фильтр на входе АЦП позволяет уменьшить амплитуду паразитных выбросов в процеcсе поразрядного уравновешивания входного сигнала. Время коммутации мультиплексора ton/toff составляет 7/4 нс. Сопротивление замкнутого канала не превышает 2.2 Ом, полоса пропускания составляет 240 МГц, рассеиваемая мощность не превышает 5 мВт.
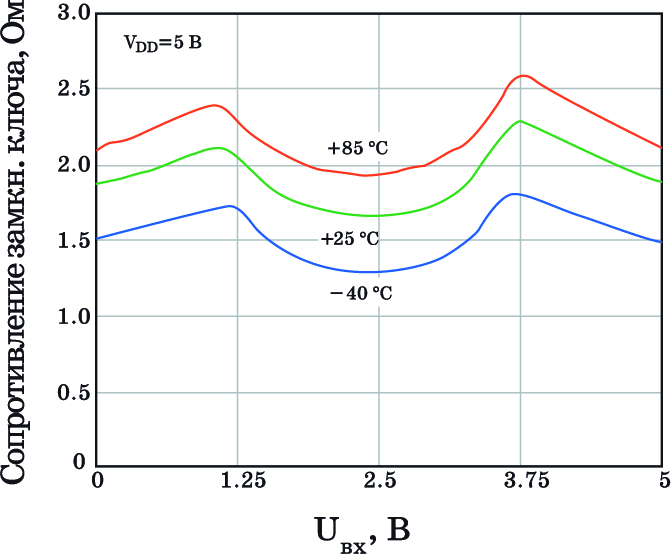
Рис. 5. Зависимость сопротивления замкнутого ключа мультиплексора от напряжения на входе и от температуры окружающей среды
На рис. 5 приведена зависимость сопротивления замкнутого канала мультиплексора от величины входного напряжения в диапазоне от 0 до 5 В при разных значениях температуры окружающей среды. Спектральная плотность входного шума усилителя-драйвера ADA4899-1 составляет 1 нВ/√Гц, уровень нелинейных искажений -117 дБ, полоса пропускания 600 МГц, скорость нарастания выходного напряжения 310 В/мкс. Широкий диапазон напряжений питания усилителя – от 2.5 до 7 В, позволяет обеспечить оптимальный режим работы усилителя. Время установления выходного сигнала усилителя амплитудой 2 В с погрешностью не более 0.1% составляет 50 нс (рис. 6).
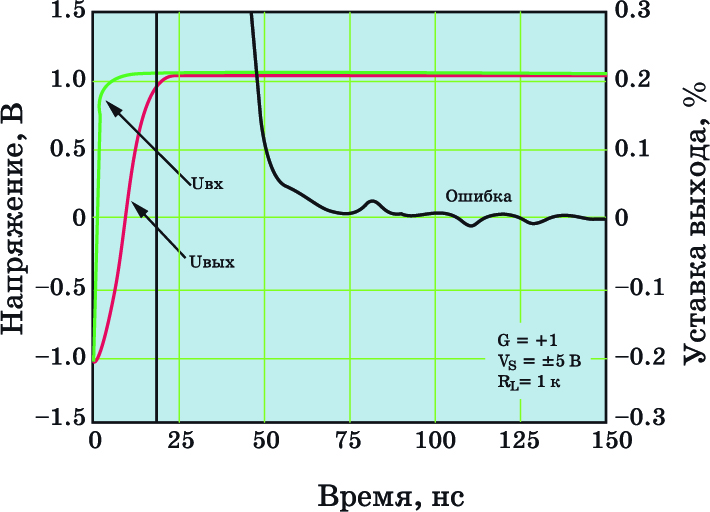
Мал. 6. Типовий час встановлення вихідного сигналу ADA4899-1
Прецизійний АЦП порозрядного врівноваження з диференціальним входом AD7960 має роздільну здатність 18 біт. Його інтегральна нелінійність становить ±0.8ЕМР, відношення сигнал/шум 99 дБ, нелінійні спотворення -117 дБ. Максимальна частота вибірки цього АЦП 5 МГц. За такої частоти вибірки потужність розсіювання перетворювача вбирається у 47 мВт. Зазначимо, що напруги живлення АЦП AD7960 5 і 1.8 формуються лінійними LDO-стабілізаторами ADP710 і ADP124 відповідно.
Для формування опорної напруги АЦП використовується зовнішнє опорне джерело ADR4550 напругою 5 В, похибка якого не перевищує ±0.02%, а споживаний струм – 950 мкА. Як буферний каскад опорного джерела використовується підсилювач AD8031, який забезпечує стійку роботу ланцюга опорної напруги при великому ємнісному навантаженні. Цифровий інтерфейс AD7960 виконаний з урахуванням LVDS-логіки.
Якщо обробка даних здійснюється одним каналом, максимальна частота вибірки системи збору і обробки даних становить 5 МГц, причому буде забезпечена точність щонайменше 14 розрядів. При організації багатоканальної обробки даних похибка системи визначається заданою продуктивністю. При цьому мінімальна похибка, спричинена перехресною перешкодою, як випливає з рис. 7 становить 0.01%. Залежність похибки систем збирання даних від величини вхідного сигналу наведено на рис. 8, причому мінімальна величина похибки, викликаної перехресною перешкодою, не перевищує 0.01% при амплітуді вхідного сигналу, що становить 10% максимального значення.
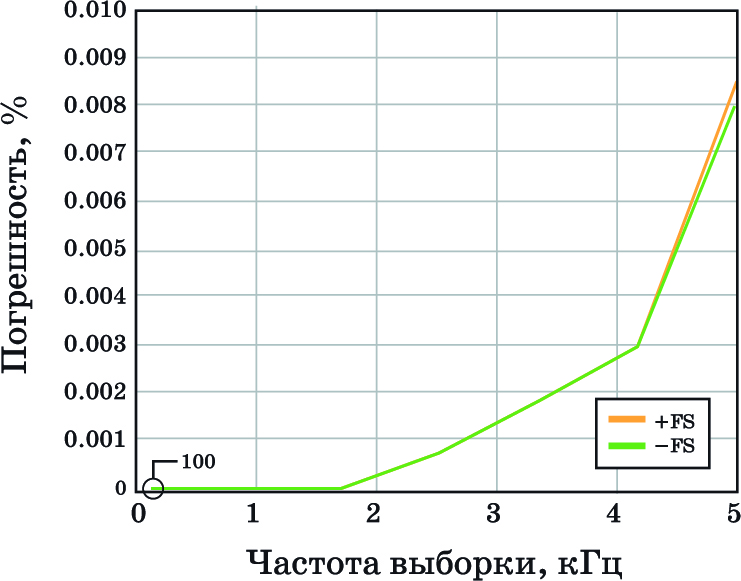
Мал. 7. Залежність похибки, спричиненої перехресною перешкодою, від частоти вибірки АЦП

Мал. 8. Залежність похибки, викликаної перехресною перешкодою, від величини диференціального вхідного сигналу та його стрибка
Враховуючи малі габарити системи збору даних та високу тактову частоту, необхідно забезпечувати ретельне розведення друкованої плати. Приклад такої плати розміром 69×85 мм наведено на рис. 9. Шини живлення АЦП та опорних сигналів при проектуванні такої плати повинні бути рознесені. Конденсатори, що розв’язують, повинні бути розташовані в безпосередній близькості від ІМС АЦП. Шини землі, живлення та тактових сигналів мають бути рознесені з шинами вхідних аналогових сигналів.
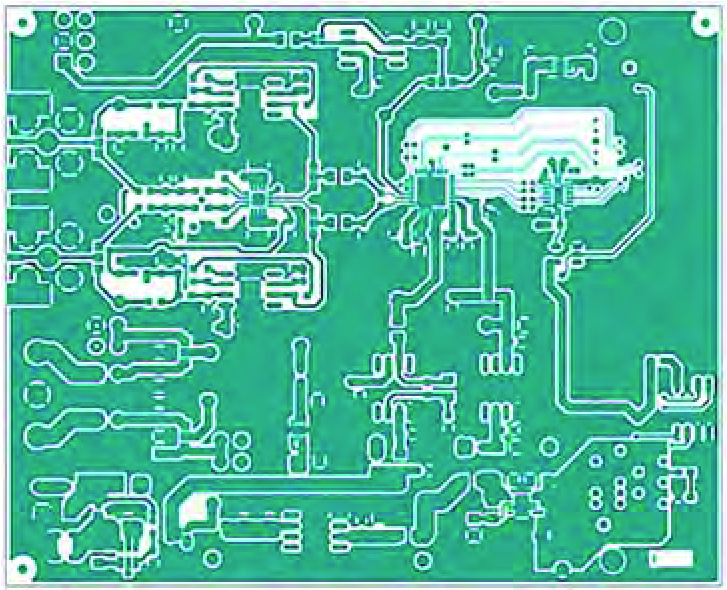
Мал. 9. Топологія друкованої плати системи збирання даних
ВИСНОВКИ:
1. Мініатюрні багатоканальні системи збору даних з малим споживанням знаходять широке застосування у промисловості та медичному приладобудуванні.
2. Реалізація таких систем може бути виконана на основі ІМС компанії Analog Devices, таких як багатоканальні мультиплексори, прецизійні підсилювачі та АЦП, опорні джерела та ін.