
У статті розглянуто особливості використання сенсорів інерціального вимірювального вузла для локалізації положення автономних мобільних роботів та окреслено основні їх переваги.
С. Пімпалкар
На сьогодні сенсори інерціального вимірювального вузла (Inertial Measurement Unit – IMU) стали невід’ємною частиною точного позиціонування автономного мобільного робота, які надають важливі дані про його рух. Інерціальні вимірювальні вузли інтегрують дані акселерометрів, гіроскопів та магнітометрів, що дозволяє автономним роботам точно визначати своє положення та рух у реальному часі і таким чином надає їм можливість орієнтуватися в динамічно мінливому середовищі.
Інтеграція сенсорів поєднує дані інерціальних вузлів з іншими сенсорами, такими як відеокамери або лідари, щоб підвищити точність локалізації робота шляхом об’єднання кількох джерел даних. Інерціальні сенсори широко використовуються в мобільній робототехніці, безпілотних літальних апаратах і віртуальній/доповненій реальності. Їхня роль у досягненні точної локалізації дозволяє роботам автономно виконувати складні завдання та ефективно взаємодіяти з навколишнім середовищем.
У статті досліджуються особливості використання інерціальних вимірювальних вузлів у складних середовищах, а також, яким чином ці вузли відіграють вирішальну роль у досягненні точної локалізації.
Автономні мобільні роботи (Autonomous Mobile Robots – AMR) потрібні для розумних виробництв і складських приміщень майбутнього. Вони відіграють ключову роль у створенні автоматизованих, стійких і екологічно чистих фабрик. Ці роботи підвищують ефективність виробництва, зменшують відходи та оптимізують управління в промислових умовах експлуатації.
Хоча фабрики майбутнього, можливо, будуть спеціально побудовані та оптимізовані для такої роботи, сьогоднішня адаптація автономних роботів до існуючих виробництв викликає суттєві труднощі. Основна перешкода для впровадження автономних мобільних роботів включає два критичні компоненти: ефективне визначення оптимального шляху і точну локалізацію з постійним оновленням положення робота у динамічному середовищі .
Ця стаття присвячена навігації роботів у закритих приміщеннях без використання GPS. Автономний мобільний робот використовує набір сенсорів і алгоритмів для локалізації та навігації. До них належать сенсори зору, такі як камери, лідари і радари, а також сенсори одометрії, такі як кодери коліс та інерціальні сенсори. Інтеграція цих сенсорів забезпечує вичерпні дані для ефективної локалізації робота в динамічному середовищі.
Стаття висвітлює особливості використання автономних мобільних роботів у складному середовищі, розкриває, як інерціальні сенсори допомагають у точній локалізації, що має вирішальне значення для навігації та автономності роботів.
Інерціальний вимірювальний вузол – це мініатюрний пристрій на основі MEMS-технології. Зазвичай він містить триосьовий акселерометр, який вимірює прискорення відносно гравітаційного поля Землі. Тривісні акселерометри використовуються для вимірювання положення відносно осей X, Y, Z, як показано на рис.1.
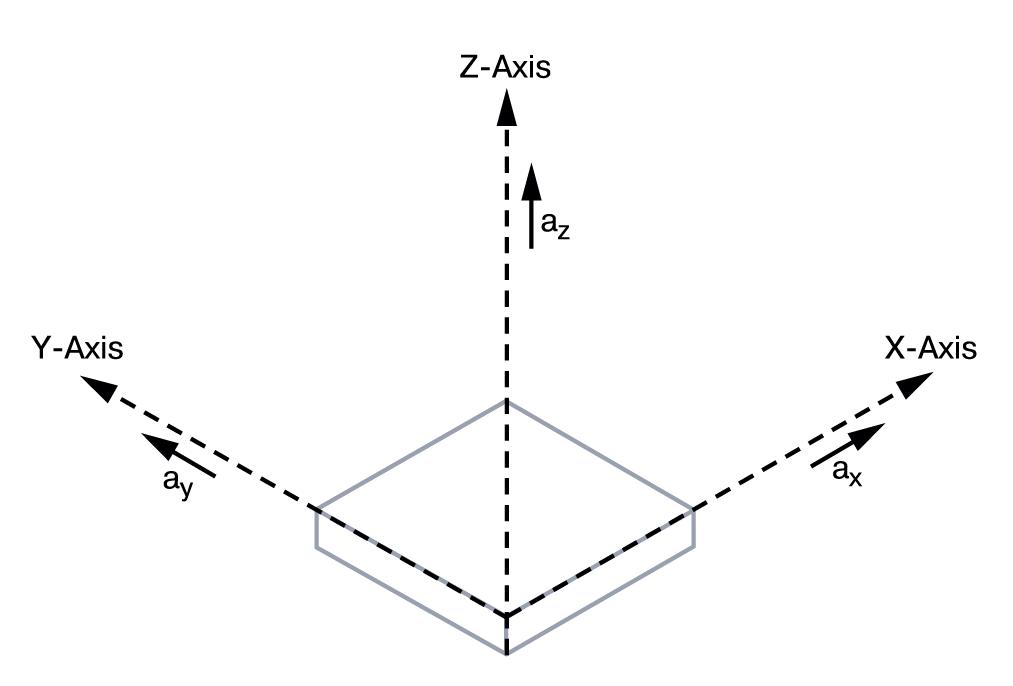
Рис. 1. Вимірювання прискорення по осях X, Y, Z
Триосьовий гіроскоп дозволяє вимірювати кутову швидкість робота (wx, wy, wz) уздовж осей X, Y, Z (рис. 2).
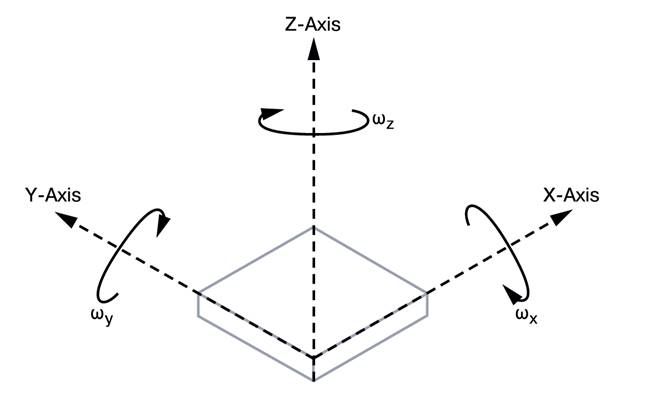
Рис. 2. Вимірювання кутової швидкості вздовж осей X, Y, Z
Високопродуктивний магнітометр забезпечує вимірювання магнітного поля для точної оцінки орієнтації робота в складних умовах. Незважаючи на те, що магнітометри зараз не дуже поширені, вони і досі використовуються в інерціальних вимірювальних вузлах. Крім того, у цих вузлах використовуються температурні сенсори для компенсації температурної похибки та сенсори тиску. Функціональна схема типового інерціального вузла містить не лише гіроскопи, акселерометри та температурні сенсори, а й АЦП з передавачем даних (рис. 3).
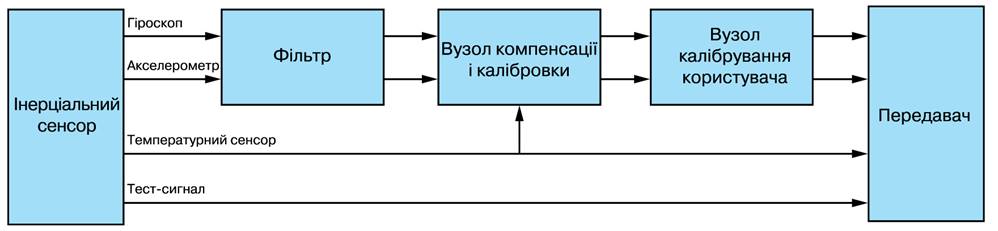
Рис. 3. Функціональна схема типового інерціального вузла
Інерціональний вимірювальний вузол містить вбудовані алгоритми попередньої фільтрації на базі КІХ-фільтрів; засоби калібрування та компенсації виправляють будь-які зміщення або зсуви характеристики сенсора; користувач має можливість обертати внутрішню вісь інерціального вузла, щоб забезпечити відповідність відліку положенню робота перед передачею остаточних даних.
Чому інерціальні вимірювальні вузли використовуються в автономному мобільному роботі? Для локалізації положення в режимі реального часу з високою швидкістю оновлення даних робот має автономну у реальному часі навігацію на основі спеціальної операційної системи. Сенсори зору, зазвичай, працюють з обмеженою частотою оновлення даних в діапазоні приблизно від 10 до 30 Гц. Навпаки, інерціальні вимірювальні вузли можуть підтримувати високу точність позиціонування робота з максимальною частотою до 200 Гц і більше.
Така висока частота оновлення даних значно підвищує надійність робота при швидкій адаптації до змін орієнтації в динамічному середовищі. Прискорена швидкість оновлення даних також дає змогу автономному роботу надавати позицію під час коротких інтервалів між вимірюваннями. Як результат, інерціальні вузли відіграють ключову роль у локалізації робота у реальному часі, перевершуючи сенсори зору з відповідно невисокою частотою оновлення даних.
Точний розрахунок: інерціальний вимірювальний вузол забезпечує точну оцінку поточного положення робота на основі попередньо відомого положення. Постійно надаючи дані про місцезнаходження, орієнтацію та швидкість протягом короткого часу, інерціальний вузол дозволяє точно оцінювати положення автономного мобільного робота, підтримуючи таким чином надійну навігацію робота у цілому.
Компактний розмір і мала вага: компактний розмір і легка конструкція інерціального вимірювального вузла роблять його ідеальними для інтеграції в мобільні роботи різного призначення. Наприклад, типові розміри інерціального вузла на сьогодні не перевищують площу 33,25х30,75 мм, що забезпечує ефективне розміщення цього вузла без шкоди для маневреності робота.
Надійність у різноманітних середовищах: інерціальний вузол є відносно стійким до електромагнітних перешкод і може працювати в різноманітних промислових середовищах.
Підвищена надійність завдяки прискореній швидкості оновлення даних: сенсори зору зазвичай обмежуються частотою оновлення від ~10 до 30 Гц, інерціальні вузли забезпечують високу точність позиціонування з частотою оновлення до 4 кГц. Висока частота оновлення підвищує надійність, особливо в динамічних середовищах, дозволяючи автономним мобільним роботам швидко оцінити свою позицію за короткий проміжок часу між вимірюваннями.
Чому інерціальний вузол є важливими для автономного мобільного робота, незважаючи на наявність сенсорів зору? Автономний робот, як показано на рис. 4, зазвичай має різноманітні сенсори зору, такі як ToF- камери, RGB-камери, лідари тощо. Незважаючи на великий набір даних, наданий візуальною одометрією, необхідність в інерцільному вузлі залишається. У наведених нижче сценаріях розглядаються відповідні причини.
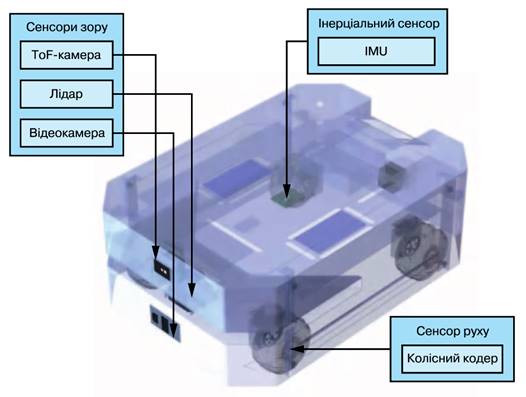
Рис. 4. Сенсори локалізації у складі автономного мобільного робота
- Автономний робот з рідкісними функціями, що переміщується в коридорі: SLAM-алгоритми одночасної локалізації та відображення (Simultaneouslocalizationandmappingalgorithms – SLAM) по суті працюють шляхом зіставлення спостережених данихвід різних сенсорів, які зберігаються на карті для локалізації робота. Коли автономний робот подорожує довгим коридором (рис. 5), він швидко втрачає свою позицію. Через відсутність характерних особливостей коридору, таких як прямі стіни з однорідним кольором, текстурою або відбивною здатністю, тобто його положення важко локалізувати. У цьому випадку інерціальний вимірювальний вузол діє як єдина система орієнтування, надаючи інформацію про напрямок і орієнтацію мобільного робота.
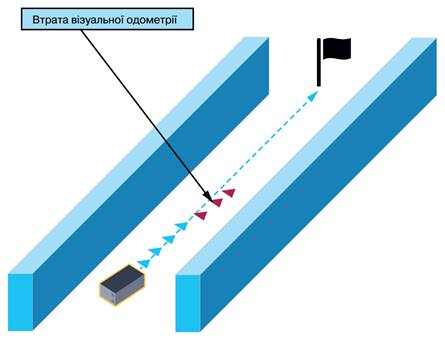
Рис. 5. Приклад того, як автономний робот втрачає візуальну одометрію у коридорі
- Обмеження радіусу дії сенсорів зору під час роботи у великому відкритому просторі, такому як величезний склад (наприклад, 50Ч50 м), обмежує можливість точної локалізації. Автономний мобільний робот зазнає труднощі з локалізацією, оскільки його функції виходять за межі діапазону сенсорів зору (наприклад, максимальний радіус дії лідарів становить зазвичай приблизно від 10 до 15 м). Як показано на рис. 6, одометрія автономного робота втрачається через великий простір. Крім того, склади часто мають однакові елементи, що ускладнює роботу сенсорів зору. У таких сценаріях інерціальний вузол та колісні кодери є єдиними надійними джерелами для точної автономної локалізації робота.
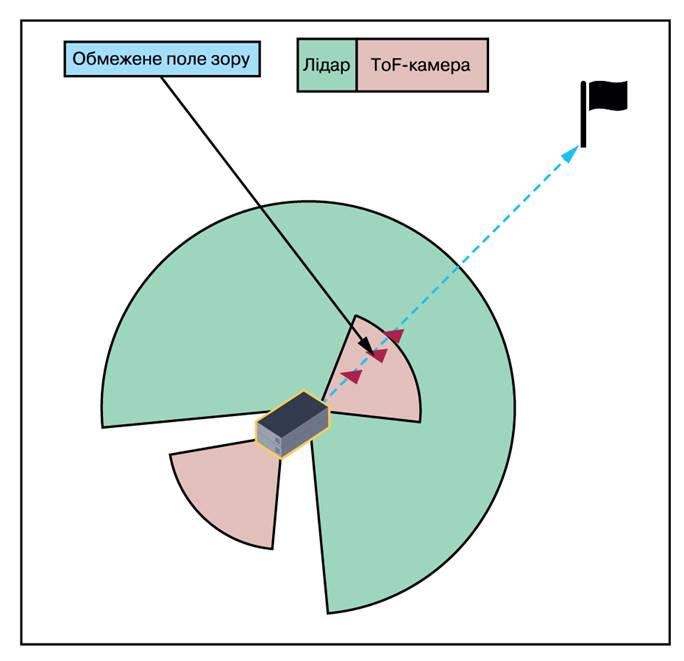
Рис. 6. Приклад обмеженого полю огляду сенсорів зору, що заважає автономному роботу локалізувати позицію у великому відкритому просторі
Під час маневрування на схилі традиційний SLAM-алгоритм локалізації і відображення стикається з проблемою, покладаючись тільки на показання лідара, оскільки дані 2D-npocmopy не мають інформації про градієнт. Отже, схили помилково сприймаються як стіни або перешкоди, що призводить до похибок, щодо прив’язки до електронної карти простору. У результаті звичайні підходи SLAM-алгоритму із 2D-параметрами стають неефективними на схилах. Інерціальні вимірювальні вузли допомагають вирішити цю проблему завдяки отриманню даних про градієнти (рис. 7), щоб ефективно управляти навігацією на схилі.
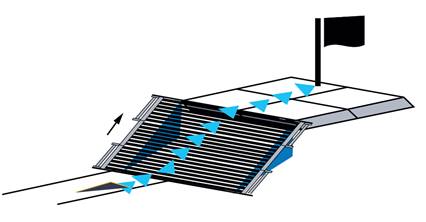
Рис. 7. Рух автономного мобільного робота по схилу
Чутливість до факторів навколишнього середовища – сенсори типу лідара можуть бути чутливі до різних факторів навколишнього середовища, таких як навколишнє освітлення, пил, туман або дощ. Ці фактори можуть погіршити точність отриманих даних від сенсора і, у свою чергу, вплинути на продуктивність роботи SLAM-алгоритму. Подібним чином на сенсори впливають відбивні поверхні та інші рухомі об’єкти (інші роботи або персонал), що ще більше заплутує роботу SLAM-алгоритму. У табл. 1 показано, як середовище впливає на якість роботи сенсорів. Інерціальні вимірювальні сенсори можуть надійно працювати в різних промислових середовищах, що робить їх універсальним вибором для застосування у мобільних роботах.
Таблиця 1. Оцінка якості роботи різних типів сенсорів з точки зору локалізації автономних роботів
| Тип сенсору | Вплив недостатнього освітленння | Вплив руху робота | Вплив відбиття від поверхні приміщення | Залежність від геометри приміщення |
| RGB-камера | Є | Є | Немає | Немає |
| ToF-камера | Немає | Є | Є | Є |
| Лідар | Немає | Є | Є | Є |
| Радар | Немає | Є | Є | Є |
| Колісні кодери | Немає | Немає | Немає | Немає |
| Інерціальний вузол | Немає | Немає | Немає | Немає |
Однак жоден сенсор не є ідеальним! Хоча інерці- альний вузол має переваги перед сенсорами зору, але його використання пов’язане з певними ризиками та обмеженнями :
- Шум: інерціальні сенсори зазнають вплив шуму, який може погіршити точність навігації та управління роботом. Щоб компенсувати вплив шуму, в цих сенсорах часто використовуються вдосконалені методи фільтрації на основі фільтрів Кал- мана або КІХ-фільтрів.
- Зміщення характеристики: інерціальні сенсори накопичують похибку зміщення з часом, що може призвести до помилок в орієнтації та оцінці руху робота. Щоб вирішити цю проблему, алгоритми оцінки зміщення використовують постійне оновлення поточних показань цього сенсора.
- Нелінійність: інерціальні сенсори мають похибкунелінійності, що може ускладнити обробку та інтерпретацію даних. Щоб компенсувати неліній- ність, їх потрібно періодично калібрувати та вносити відповідні поправки.
- Випадкове блукання: інерціальні сенсори чутливі до зовнішніх термомеханічних навантажень, що спричиняють похибки, викликані випадковим блуканням кута у гіроскопі та випадковим блуканням швидкості в акселерометрі.
Як можна зменшити вплив цих факторів? Відповідь полягає у об’єднанні сенсорів. Як допомагає така інтеграція сенсорів:
- Підвищується надійність і точність даних.
- Краще оцінюються невиміряні стани.
- Збільшується охоплення простору, та безпека руху робота.
Значення алгоритму об’єднання сенсорів:
- Методи оцінки стану, такі як розширена фільтрація Калмана, можуть компенсувати похибки та нестабільність зсуву характеристики автономного робота. Похибки тангажу та крену гіроскопа можна усунути шляхом вимірювання прискорення земного тяжіння. Алгоритм відстежує та виправляє дрейф зсуву характеристики робота.
- Застосування фільтру Калмана дає можливість підтримати оцінку минулого, теперішнього та майбутнього (прогнозного) станів робота. На рис. 8 показано дію спрощеного алгоритму Калмана. Забезпечується синхронізація вимірювань між різними інтегрованими сенсорами, прогнозування позиції робота та оцінка похибок, а також оцінка невизначеності прогнозованого значення позиції робота.
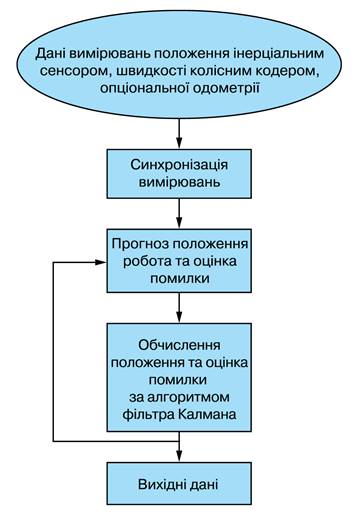
Рис. 8. Спрощений алгоритм фільтра Калмана
У типовій системі управління автономним мобільним роботом на основі спеціальної операційної системи сенсори зору разом із інерціальними сенсорами та колісними одометрами (рис. 9) об’єднані за допомогою програмного пакету з відкритим кодом під назвою robot_localization , який використовує алгоритм Калмана. Цей пакет дозволяє інтегрувати велику кількість сенсорів з різними даними, включно тривимірні оцінки положення та орієнтації робота, а також параметри лінійних та кутових швидкостей і прискорень. Всі ці параметри обробляються SLAM-алгоритмом локалізації. Результати локалізації виражаються наступними параметрами:
- позиція робота = (X, Y, Z, крен, нахил, поворот);
- швидкість робота =(X’, Y’, Z’, крен’, нахил’, поворот’);
- прискорення робота =(X”, Y”, Z” крен”, нахил”, поворот”).
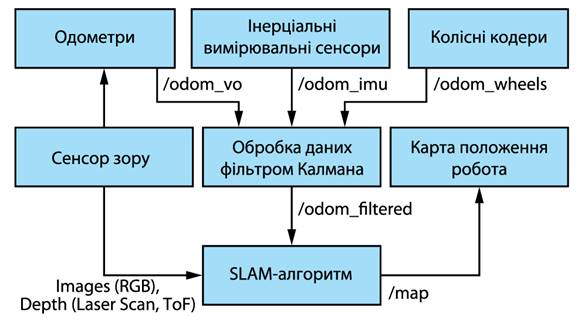
Рис. 9. Типова система інтеграції сенсорів із використанням спеціальної операційної системи
ВИСНОВКИ
На сьогодні інерціальні вимірювальні сенсорні вузли є обов’язковими для локалізації положення автономних мобільних роботів, оскільки вони забезпечують оцінку орієнтації та відстеження руху робота та забезпечують реакцію у реальному часі з високою швидкістю оновлення даних . Це дозволяє автономному мобільному роботу швидко орієнтуватися у різних динамічних середовищах. Інтеграція сенсорів на основі фільтру Калмана дозволяє поєднувати різні за принципом роботи сенсори, щоб компенсувати обмеження у використанні кожного типу сенсора у складі мобільного робота.
ЛІТЕРАТУРА
- Shoudong Huang and Gamini Dissanayake. “Robot Localization: An Introduction.” John Wiley & Sons, Inc., August 2016.
- Oliver J. Woodman. “An Introduction to Inertial Navigation.” University of Cambridge, August 2007.
- Robot_localization 2.6.12 documentation. Tom Moore, 2016.
- Randy Carver and Mark Looney. “MEMS Accelerometer Calibration Optimizes Accuracy for Industrial Applications.” EE Times, October 2007.