
Датчики положения широко используются в промышленности для определения положения управляемого транспортного или других подвижных устройств и систем, например, робототехнических комплексов. Однако существующие датчики положения, как правило, измеряют положение системы в пределах одного оборота или 360°.
Системы, в которых необходимо измерять положение управляемого объекта при нескольких оборотах, обычно содержат резервный источник питания для отслеживания и запоминания нескольких оборотов после внезапной потери электропитания или для мониторинга вращательного движения. В качестве альтернативы в такую систему включают редуктор, чтобы уменьшить число измеряемых оборотов до одного, и в сочетании с датчиком одиночного оборота получают информацию о положении после многооборотного вращения. Следует отметить, что это сложное и дорогое решение, которое требует дополнительного технического обслуживания.
Вращательные и линейные энкодеры являются ключевыми устройствами в механических системах, положение которых должно быть известно даже при потере электропитания. Задача разработчика такой системы или устройства состоит в том, чтобы обеспечить доступность данных об их положении, в том числе, и при отключении питания. Если информация о положении системы при аварийном отключении питания утрачена, то требуется длительная и зачастую сложная процедура для возврата системы в исходное состояние.
В современном промышленном производстве все чаще используются роботы и коботы для сокращения временных затрат, а также для повышения эффективности и производительности труда.
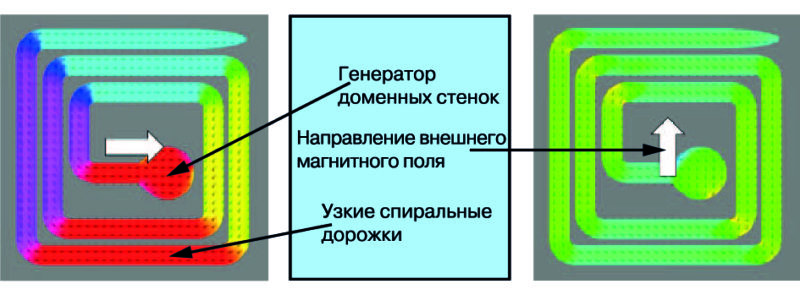
Рис. 1. Принцип действия магнитного многооборотного датчика на основе эффекта Вигана
Потеря эффективности такого производства связана с вынужденными простоями оборудования, в частности, роботов и других средств автоматизации, вызванная необходимостью перенастройки и инициализации оборудования после внезапного отключения питания. В результате вынужденные, незапланированные простои снижают эффективность автоматизированных производств. Эту проблему частично можно решить резервированием питания памяти и применением однооборотных датчиков с редуктором, но такой подход имеет свои недостатки. Резервные аккумуляторные блоки имеют ограниченный срок службы и требуют специального технического обслуживания.
Альтернативой резервному питанию от аккумуляторных батарей является использование датчиков на основе эффекта Виганда (Wiegand). Эффект Виганда – физическое явление, открытое в 1970-х годах Джоном Вигандом. Этот эффект проявляется в том, что если ферромагнитную проволоку, имеющую специальный химический состав и физическую структуру, внести в магнитное поле, то происходит спонтанное изменение ее магнитной поляризации, как только напряженность поля превысит некоторое пороговое значение, называемое порогом зажигания. Изменение состояния проволоки можно регистрировать при помощи обмотки вокруг проволоки или размещенной рядом с ней. Датчик Виганда представляет собой двухполюсник, реагирующий на изменение внешнего магнитного поля и вырабатывающий сигналы до нескольких вольт при условии, что напряженность управляющего магнитного поля превышает величину напряженности порога зажигания. Датчики на основе эффекта Виганда позволяют измерять количество оборотов подвижного тела без применения источника питания, их выходной сигнал практически не зависит от частоты изменения поля, и их можно использовать в широком диапазоне рабочих температур от-196…+175 °С.

Рис. 2. Многооборотный датчик ADMT4000 компании Analog Devices
Разработанные компанией Analog Devices датчики на основе эффекта Виганда так же, как и магнитная многооборотная память, не требуют использования напряжения питания для регистрации числа оборотов внешнего магнитного поля и соответственно подвижного объекта, генерирующего это поле. Более подробно с эффектом Вигана можно ознакомиться на сайте: www.analog.com/magnetics.
В основе конструкции нового магнитного многооборотного датчика лежит спираль из ферромагнитного материала с сверхбольшим магнитным сопротивлением Принцип действия датчика основан на генерации доменных стенок в под воздействием внешнего магнитного поля. При вращении внешнего магнитного поля доменные стенки распространяются по узким спиральным дорожкам (нанопроволокам), прикрепленным к генератору доменных стенок, как показано на рис. 1.
По мере того как доменные стенки перемещаются по структурам спиральных дорожек, состояние каждого элемента спиральной дорожки изменяется. Поскольку элементы датчика изготовлены из материала с сверхбольшим магнитным сопротивлением, состояние каждого из них можно определить, измерив их сопротивление. Датчик реагирует на изменение внешнего магнитного поля, т.е. для подсчета числа оборотов не требуется дополнительного резервного питания. Когда напряжение питания в подвижной системе восстанавливается и снова подается на датчик, показания числа оборотов в счетчике оборотов считываются оператором оборудования без перезагрузки и возврата системы в исходное состояние.
Структурная схема многооборотного датчика ADMT4000 приведена на рис. 2 и содержит собственно многооборотный сенсор и микросхему для преобразования выходных сигналов сенсора в число оборотов подвижного объекта, на котором установлен этот датчик. ИМС ADMT4000 позволяет регистрировать до 46 оборотов или 16 560° при потере питания с погрешностью не более ±0,25°.
Встроенный в ИМС узел преобразования, кроме того, обеспечивает калибровку устройства в целом, необходимую для уменьшения влияния внешних паразитных магнитных полей и механических нагрузок, вызванных расположенным в непосредственной близости оборудованием. Датчик ADMT4000 устанавливается против дипольного магнита, расположенного на вращающемся валу, как показано на рис. 3.

Рис. 3. Типовая схема установки датчика
ADMT4000 на вращающемся оборудовании
Компания Analog Devices разработала прототип датчика, который позволяет разработчикам протестировать датчик ADMT4000, установленный в проектируемом изделии. Прототип устойчив к паразитным магнитным полям, что позволит разработчикам использовать этот датчик в условиях электромагитных помех, в частности, в непосредственной близости от электродвигателей или исполнительных механизмов.
Датчик ADMT4000 предназначен для использования во многих приложениях, включая мониторинг положения роботов или коботов манипуляторов в случае аварийного отключения электропитания (рис. 4).

Рис. 4. Установка многооборотных датчиков
положения ADMT4000 в роботе манипуляторе
Промышленные приложения, для которых предназначен многооборотный датчик ADMT4000, включают мониторинг подвижных объектов в составе станков или медицинского оборудования (рис. 5).

Рис. 5. Установка многооборотного датчика
положения ADMT4000 во вращающемся
исполнительном механизме промышленного
или медицинского оборудования
В других приложениях обеспечивается подсчет оборотов катушек и барабанов подъемных механизмов, лебедок и т.п. (рис. 6, 7, 8) при мониторинге оборотов в условиях аварийного отключения питания или перебоев в подаче электроэнергии.

Рис. 6. Установка многооборотного датчика
положения ADMT4000 в подъемном механизме

Рис. 7. Установка многооборотного датчика положения ADMT4000 в электроусилите руля автомобиля

Рис. 8. Втягивающийся ремень безопасности
автомобиля
Малые габариты, невысокая стоимость, широкий диапазон рабочих температур многооборотного датчика ADMT4000 позволяют использовать его во многих приложениях, в том числе критически важных с точки зрения обеспечения безопасности приложения, включая современные транспортные средства, робототехнические линии и т.п., в соответствии с требованиями стандартов по безопасности эксплуатации оборудования ISO 26262.
ВЫВОДЫ
ИМС ADMT4000 – первый встроенный многооборотный датчик положения, предназначенный для применения в подвижных механизмах для определения положения при аварийных отключениях питания. Использования этого датчика повышает надежность, эффективность и увеличивает безопасность эксплуатации сложного промышленного оборудования.