
Интеллектуальное управление потребляемой мощностью становится отличительным признаком все большего числа современных бытовых и промышленных электронных устройств. Сокращение расхода энергии приводит к уменьшению эксплуатационных затрат и нагрузки на окружающую среду. В статье описано, как применение технологии DBC в модулях серии Motion-SPM, предназначенных для управления электродвигателями, позволило увеличить выходную мощность модулей.
А. Мельниченко
Основными потребителями энергии в бытовых и промышленных изделиях, таких, например, как кондиционеры, являются электродвигатели. Естественно, что в целях экономии потребители стремятся сократить количество расходуемой ими энергии, что также способствует уменьшению нагрузки на окружающую среду. Поэтому все большее число устройств управления двигателями строится на основе инверторов.
Для удовлетворения потребностей рынка в высокоэффективных SPM-модулях (Smart Power Module) компания Fairchild Semiconductor разработала ряд модулей под торговой маркой Motion-SPM . Две первых серии таких модулей в корпусах DIP (длиной 31 мм) и Mini-DIP (26.8 мм) уже имеются в прода-же. Эти модули используются изготовителями электронной аппаратуры и спрос на них растет, что подтверждает их высокие потребительские качества.
После того как появились первые модули этих серий следующим шагом явился выпуск новых с током нагрузки до 15 А в корпусах SIP (single in-line package). Эти специализированные модули успешно применяются в устройствах управления двигателями мощностью до 1.5 кВт, для которых ранее использовались IGBT-транзисторы, что позволяет уменьшить габариты этих устройств и упростить технологию их серийного производства.
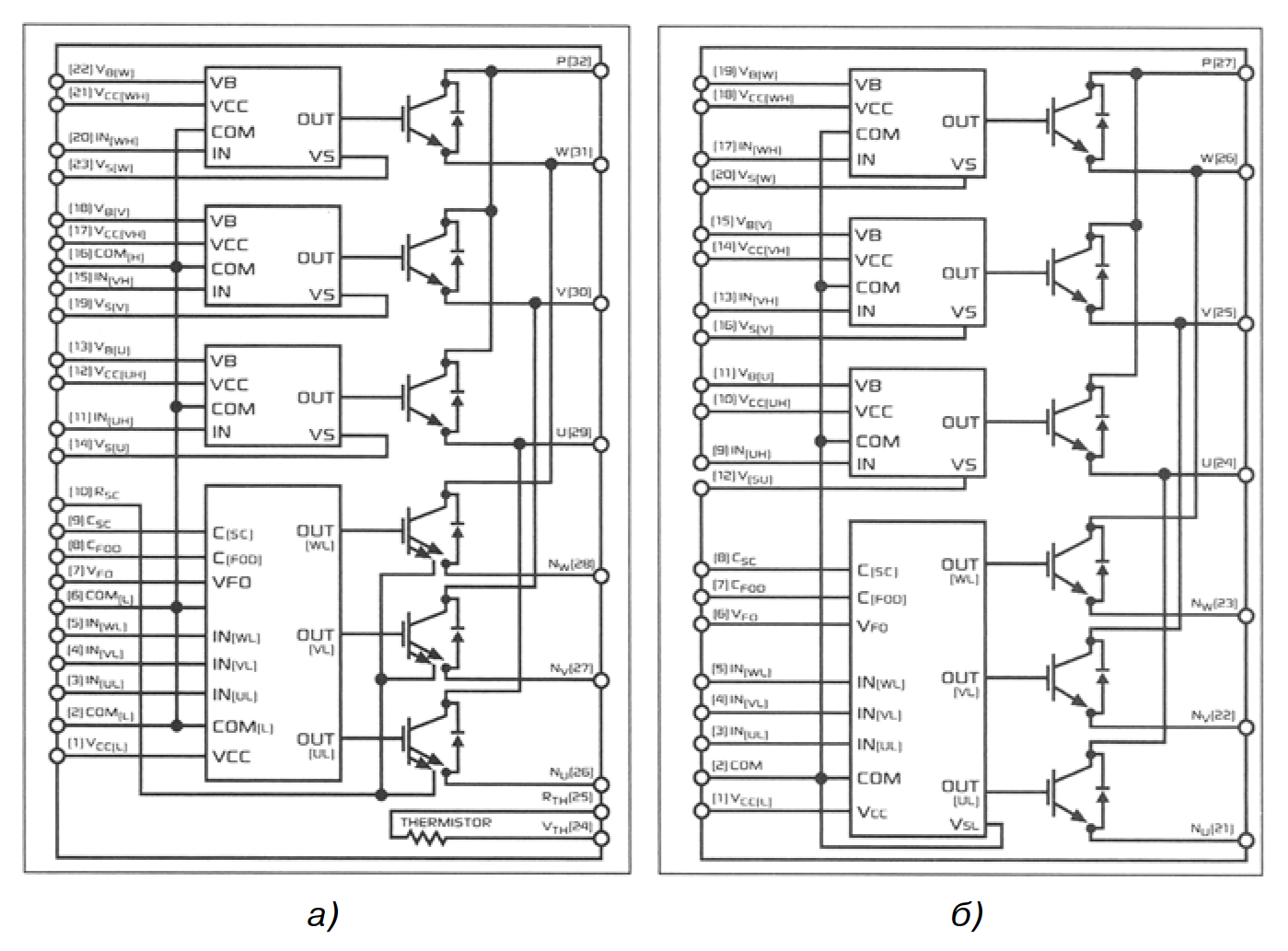
Рис. 1. Блок-схемы модулей в корпусе DIP (а) и Mini-DIP (б)
Устройство и характеристики модулей. На рис. 1 показана блок-схема модуля Motion-SPM. Модуль в корпусе DIP содержит три IGBT-транзистора, три IGBT-сенсора, шесть диодов, тривысоковольтных (HVIC) и одну низковольтную (LVIC) микросхемы, а также термистор. В корпусе Mini-DIP расположены шесть IGBT-транзисторов, шесть диодов, три высоковольтные и одна низковольтная микросхемы. Транзисторы отличаются малыми потерями на переключение, способны выдерживать короткое замыкание в цепи нагрузки, а также имеют плавную характеристику переключения, чем достигается малый уровень электромагнитных помех. IGBT-сенсоры имеют линейную характеристику чувствительности, что упрощает разработку новых устройств.
Повышение надежности работы модулей обеспечивается также встроенным датчиком температуры, наличием схем блокировки при уменьшении питающего напряжения и защиты от короткого замыкания в цепи нагрузки. Питание модулей осуществляется от одного источника напряжения, при этом применение развязывающих оптронов не требуется. Все эти меры позволили уменьшить занимаемую модулем площадь и его стоимость. Модули имеют три дополнительных вывода, которые можно использовать для контроля величины выходных токов, подключив их к отрицательному полюсу источника питания через внешние резисторы.
Модули Motion-SPM имеют компактный корпус, в котором смонтировано несколько кристаллов. Корпус обеспечивает хороший отвод тепла от кристаллов к внешнему теплоотводу. Монтаж на подложку кристаллов с большой рассеиваемой мощностью выполнен с использованием технологии DBC (direct bonded copper – подложки с двусторонним медным покрытием).
Использование модулей SPM позволяет увеличить диапазон максимальных токов до 75 А при одновременном уменьшении флуктуаций тока, габаритных размеров и перекрестных помех. Используемые в них подложки из керамики или нитрида алюминия с технологией DBC применяются уже в течение многих лет благодаря их высокой теплопроводности. Малое расстояние между выводной рамкой и теплоотводом также способствует уменьшению теплового сопротивления корпуса. Однако выбор этого расстояния менее 2 мм нежелателен, так как при этом снижается надежность модулей. Толщина корпуса модуля составляет 5.5 мм, его сечение показано на рис. 2.

Рис. 2. Структура модуля (корпус DIP)
Ширина изоляционного промежутка между соседними выводами и между выводами и теплоотводом в модулях SPM составляет соответственно 3 и 4 мм, что удовлетворяет требованиям Международной Электротехнической Комиссии (IEC), предъявляемым к инверторам.
Увеличение выходной мощности. Увеличение выходной мощности было достигнуто благодаря уменьшению теплового сопротивления между корпусом и кристаллом и сокращению потерь энергии в активных элементах.
В первых сериях модулей Motion-SPM использовались только керамические подложки, главным образом из-за их невысокой стоимости. Впоследствии был разработан корпус, имеющий ряд неоспоримых преимуществ, как-то: отличную теплопроводность и изоляционные качества, а также оптимальную интеграцию нескольких кристаллов. Это позволило увеличить максимальный ток нагрузки модулей почти вдвое, а тепловое сопротивление между корпусом и кристаллом уменьшить почти наполовину. Причем увеличение максимального тока не повлияло на габаритные размеры модулей (рис. 3).
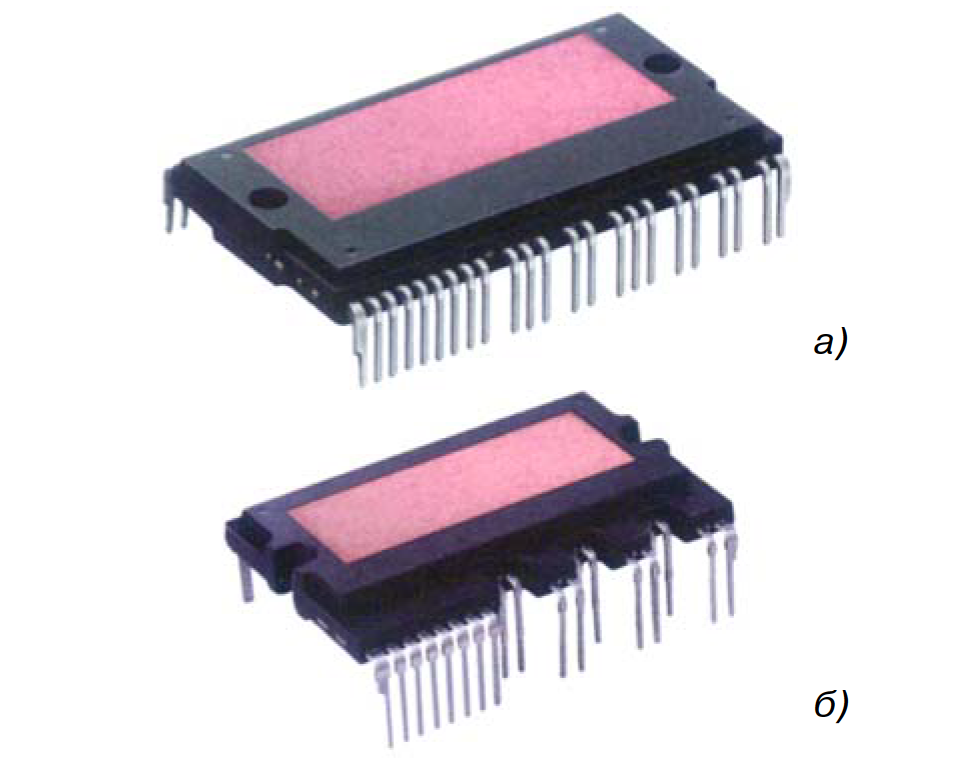
Рис. 3. Внешний вид модулей в корпусе DIP (а) и Mini-DIP (б)
Потери энергии в модулях обусловлены активными потерями на сопротивлениях открытых транзисторов и потерями на их переключение. Активные потери зависят от тока через транзисторы и их сопротивления насыщения, зависящего, в свою очередь, от температуры. Потери на переключение обусловлены динамическими характеристиками транзисторов. Для вычисления динамических потерь можно воспользоваться приведенными в расчетами, действительными при следующих (наиболее типичных) условиях: коэффициент ШИМ-модуляции MI = 0.8, cos^ = 0.9, напряжение питания выходных транзисторов Vdc = 300 B, напряжение питания модуля Vcc = 15 B, температура кристалла Tj = 125 °C, форма выходного тока – синусоидальная. Зависимость максимального выходного тока модулей в корпусах DIP (600 В, 75 А) и Mini-DIP (600 В, 30 А) от частоты при Vdc=300 B, Vcc = 15 B, Tj = 125 °C приведена на рис. 4.
Типовая схема включения модулей Motion-SPM приведена в руководстве по применению AN-9035 фирмы Fairchild (www.fairchild.com).
Напряжение 15 В используется для питания низковольтных IGBT-транзисторов и преобразователя, предназначенного для питания высоковольтных интегральных схем. Низковольтные схемы служат для блокировки команд контроллера и выработки признака аварии при отказе источника тока или снижении питающего напряжения ниже допустимого.
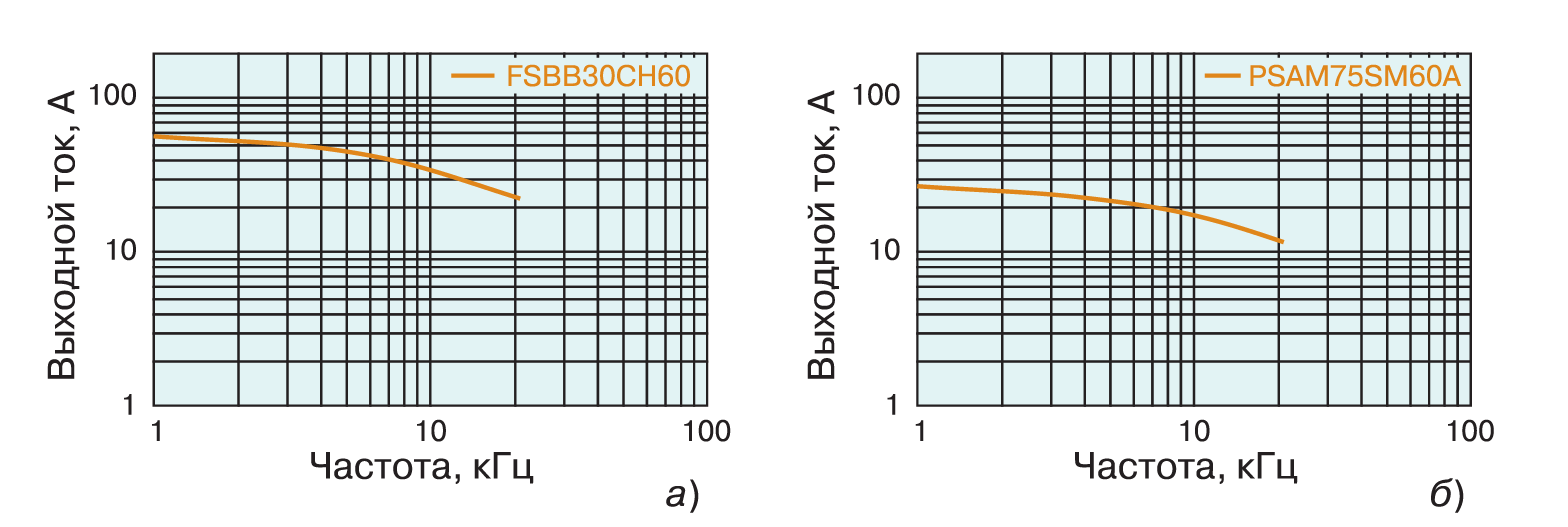
Рис. 4. Зависимость допустимого выходного тока от частоты для модулей в корпусе DIP (а) и Mini-DIP (б)
Аргументами в пользу перехода к высоковольтным схемам управления транзисторами являются упрощение и удешевление разработки, а также обеспечение эффективного управления ШИМ-сигналом. Такое решение позволило отказаться от применения оптрон- ных развязок, обеспечить питание всех схем от одного источника и увеличить скорость управления. Для предотвращения эффекта “защелки”, который может вызвать отказ модуля, импеданс в схеме токовой петли увеличен за счет последовательного подключения к выводу Vs дополнительной цепи, как показано на рис. 5. Эта цепь предотвращает протекание тока через паразитные p-n-переходы транзисторов из-за действия помех с крутыми фронтами и большими отрицательными выбросами.
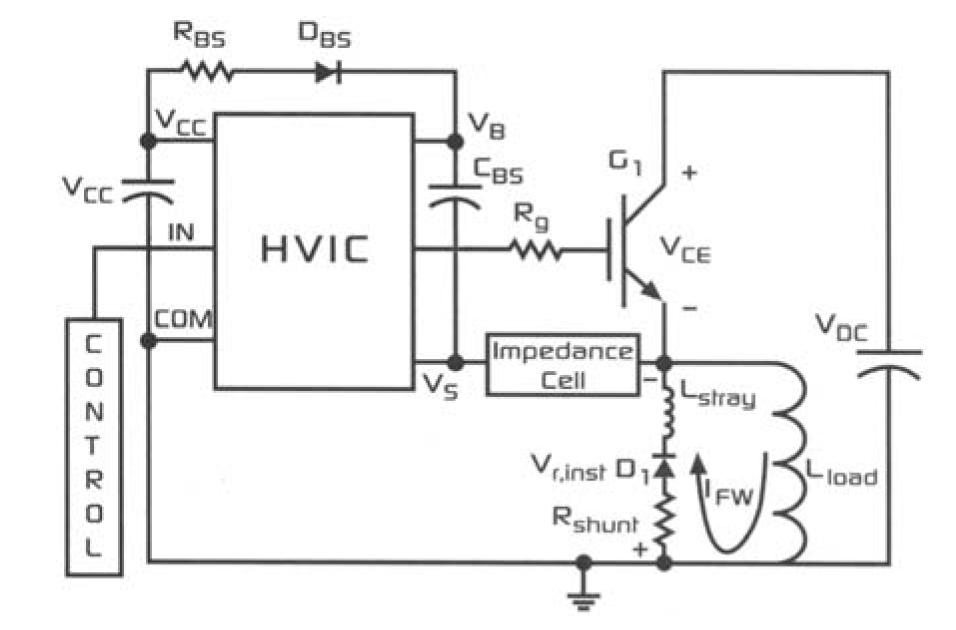
Рис. 5. Схема управления выходным транзистором (HVIC – Высоковольтная интегральная схема, CONTROL – Управление, IMPEDANCE CELL – Цепь дополнительного импеданса)
Заключение. Высокая нагрузочная способность и компактные размеры модулей Motion-SPM, отличающихся высокой степенью интеграции, явились результатом применения технологии DBC, что позволило создать изделие с максимальным выходным напряжением до 600 В и током нагрузки до 75 А для модулей в корпусах DIP и до 30 А – в корпусах Mini-DIP, что более чем вдвое превышает мощность изделий предыдущих модификаций. Применение этих модулей позволит разработчикам повысить надежность устройств, упростить их конструкцию и монтаж, а также увеличить соотношение “(удельная выходная мощность)/затраты” при проектировании устройств управления двигателями.