
В статье рассмотрены особенности проектирования весоизмерительных систем.
К. Слаттери, М. Най
Основными тенденциями развития современных весоизмерительных систем являются повышение точности и снижение стоимости. На первый взгляд, современные весоизмерительные системы, имеющие разрешение 1:3000 или даже 1:10 000, могут быть построены на основе 12- или 14 разрядных АЦП. Однако, на самом деле, для обеспечения высокого качества таких систем приходится использовать АЦП с разрешением до 20 двоичных разрядов. В статье анализируются требования к таким системам и рассматриваются особенности их построения. Прежде всего, это относится к уровню шумов, динамическому диапазону АЦП, дрейфу коэффициента усиления усилителя в измерительном тракте. Анализ основан на сравнительной оценке результатов измерения в реальной весоизмерительной системе и в оценочной плате, входным сигналом для которой является напряжение высокостабильного опорного источника.
В большинстве весоизмерительных систем используются датчики мостового типа с выходом по напряжению. Типовая функциональная схема такого датчика приведена на рис. 1.
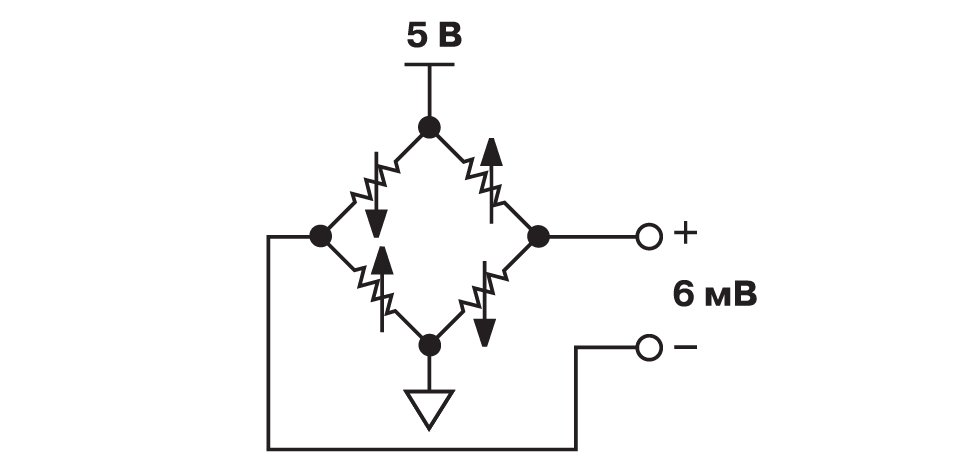
Рис. 1. Типовая функциональная схема датчика мостового типа
Чувствительность датчика определяется как отношение выходного напряжения к напряжению возбуждения мостовой схемы и составляет, как правило, 2 мВ/В, т.е. максимальное выходное напряжение составляет 10 мВ, если напряжение возбуждения равно 5 В. Если датчик используется только в линейной области, диапазон выходного напряжения составляет не более 6 мВ. Если максимальный диапазон выходного сигнала датчика в условиях промышленных помех не превышает 6 мВ, обеспечить высокую точность измерения достаточно сложно. Типовая суммарная погрешность современных весоизмерительных систем не превышает 0.02%. Отметим, что мостовой датчик имеет временной дрейф. Типовая характеристика этого дрейфа приведена на рис. 2,

Рис. 2. Временной дрейф мостового датчика
причем съем характеристики осуществлялся при постоянной температуре окружающей среды. Рассмотрим подробнее основные технические характеристики весоизмерительных систем. Функциональная схема типовой системы приведена на рис. 3. Внутреннее разрешение таких систем может находиться в пределах от 1:3000 до 1:10 000. Это значит, например, что вес 5 кГ измеряется с точностью 0.5 Г при разрешении 1:10 000. Разрешение системы, которое отображается на ЖК-дисплее, получило название внешнее разрешение. Для того, чтобы обеспечить требуемое внешнее разрешение, внутреннее должно быть не менее чем в 10-20 раз больше, т.е. для приведенного выше примера внутреннее разрешение должно составлять не менее 1:200 000.
Если в весоизмерительных системах используется стандартный АЦП, динамический диапазон которого определяется напряжением опорного источника и составляет, как правило, 2.5 В, то использование входного измерительного усилителя с коэффициентом усиления 128 при выходном диапазоне датчика 6 мВ позволяет использовать динамический диапазон этого АЦП не более чем на 30%. С другой стороны, если внутреннее разрешение системы для измерения напряжения в диапазоне 768 мВ должно составлять 1:200 000, то разрешение АЦП должно быть еще в три-четыре раза лучше, т.е. разрешение АЦП приближается к 1:800 000, что составляет 19…20 двоичных разрядов.
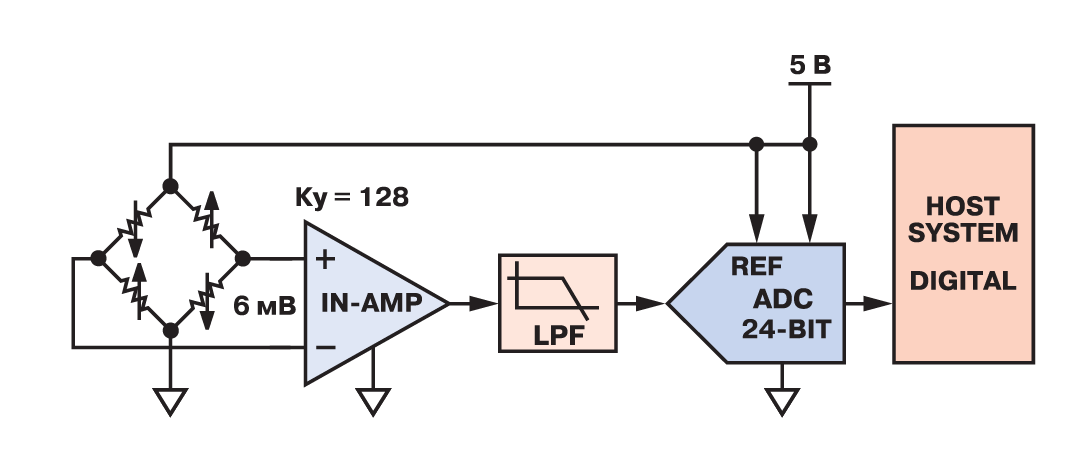
Рис. 3. Функциональная схема типовой весоизмерительной системы
Весоизмерительные системы работают в диапазоне температур от 0 до 50 °С. Это значит, что если в весоизмерительной системе температурный дрейф 20-разрядного АЦП составляет 1 ppm/°C, то температурная погрешность при температуре 50 °С составит 50 ЕМР. Следовательно, в таких системах целесообразно использовать более стабильные преобразователи. Большинство современных сигма-дельта АЦП имеют на входе схему прерывания, обеспечивающую минимальный температурный дрейф и (1/f)-шум. Так, например, преобразователь AD7799 имеет дрейф 10 нВ/°С, что обеспечивает погрешность 1/4 ЕМР в диапазоне рабочих температур.
Для характеристики АЦП в составе весоизмерительных систем часто используют эквивалентное или эффективное разрешение. В первом случае учитывается полный размах шума (от пика к пику), во втором – среднеквадратичное значение шума. Следует отметить, что эффективное разрешение больше эквивалентного для одного и того же АЦП, поэтому разработчикам необходимо внимательно анализировать техническое описание, в котором, как правило, приводится один из этих параметров.
Лучшими преобразователями для применения в весоизмерительных системах благодаря высокой линейности, низкому уровню шумов и небольшой частоте выборки являются сигма-дельта АЦП. В составе таких АЦП имеются PGA-усилители для усиления сигналов низкого уровня. Сигма-дельта АЦП AD7799 производства компании Analog Devices при напряжении опорного источника 2.5 В, коэффициенте усиления PGA-усилителя 128 и частоте выборки 4.17 Гц имеет разрешение 20.5 бит. Если в этом АЦП повысить частоту выборки до 500 Гц, его разрешение уменьшится до 16.5 бит. Поэтому при разработке весоизмерительных систем нужно правильно задавать параметры используемого в системе АЦП. Как правило, частота выборки сигма-дельта АЦП весоизмерительных систем не превышает 10 Гц. Преобразователь АЦП AD7799, специально разработанный для весоизмерительных систем, имеет минимальную спектральную плотность шума 27 нВ/лГц, максимальный коэффициент усиления PGA-усилителя в составе этого АЦП равен 128. Датчик мостового типа может быть подключен непосредственно ко входу AD7799 без предварительного усиления входного сигнала.
На рис. 4 приведена функциональная схема оценочной платы разработки компании Analog Devices, предназначенной для проектирования весоизмерительных систем. В качестве АЦП в данной плате использован AD7799, управляемый микроконвертером ADuC847. Учитывая то, что в составе ADuC847 имеется свой 24-разрядный сигма-дельта АЦП, разработчик может проанализировать два варианта весоизмерительной системы на основе оценочной платы и выбрать для серийного применения наилучший.
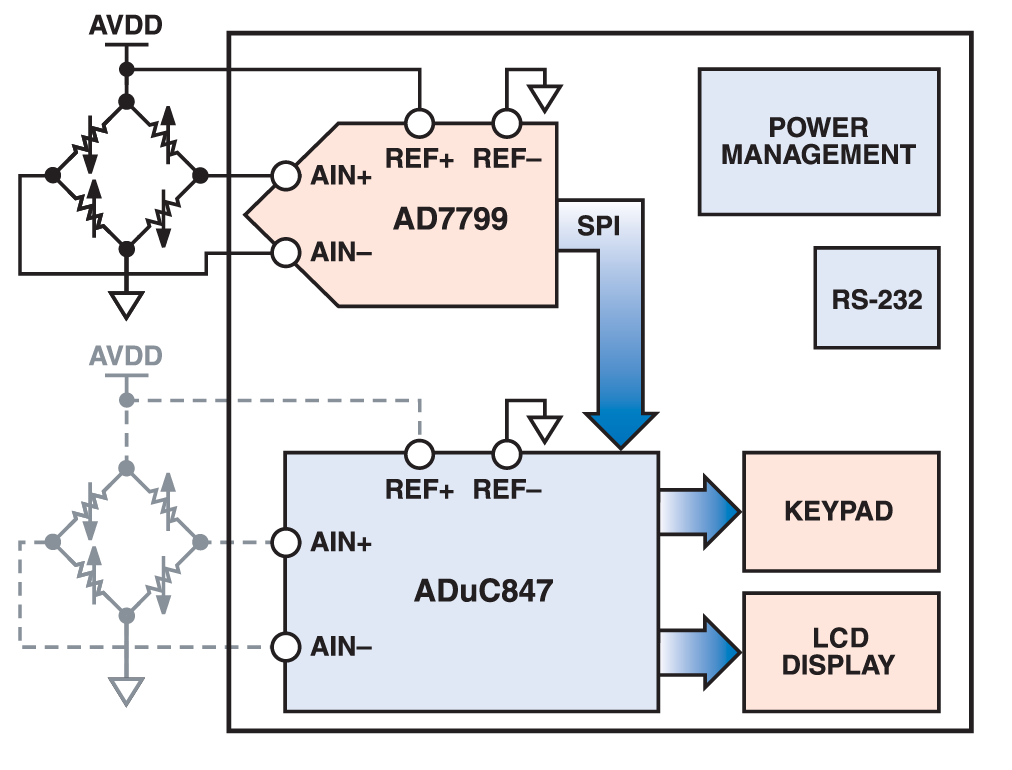
Рис. 4. Функциональная схема оценочной платы для проектирования весоизмерительных систем
На рис. 5 и 6 приведены результаты тестирования АЦП AD7799 для двух случаев. В первом (рис. 5) вход 24-разрядного АЦП подключен к опорному источнику, во втором (рис. 6) – к выходу мостового датчика. В первом случае эквивалентное разрешение АЦП составило 19.576 бит, во втором эквивалентное разрешение ухудшилось всего на 0.2 бита и составило 19.399 бит. Это значит, что основной шум в результат преобразования вносит не датчик, а собственно АЦП.
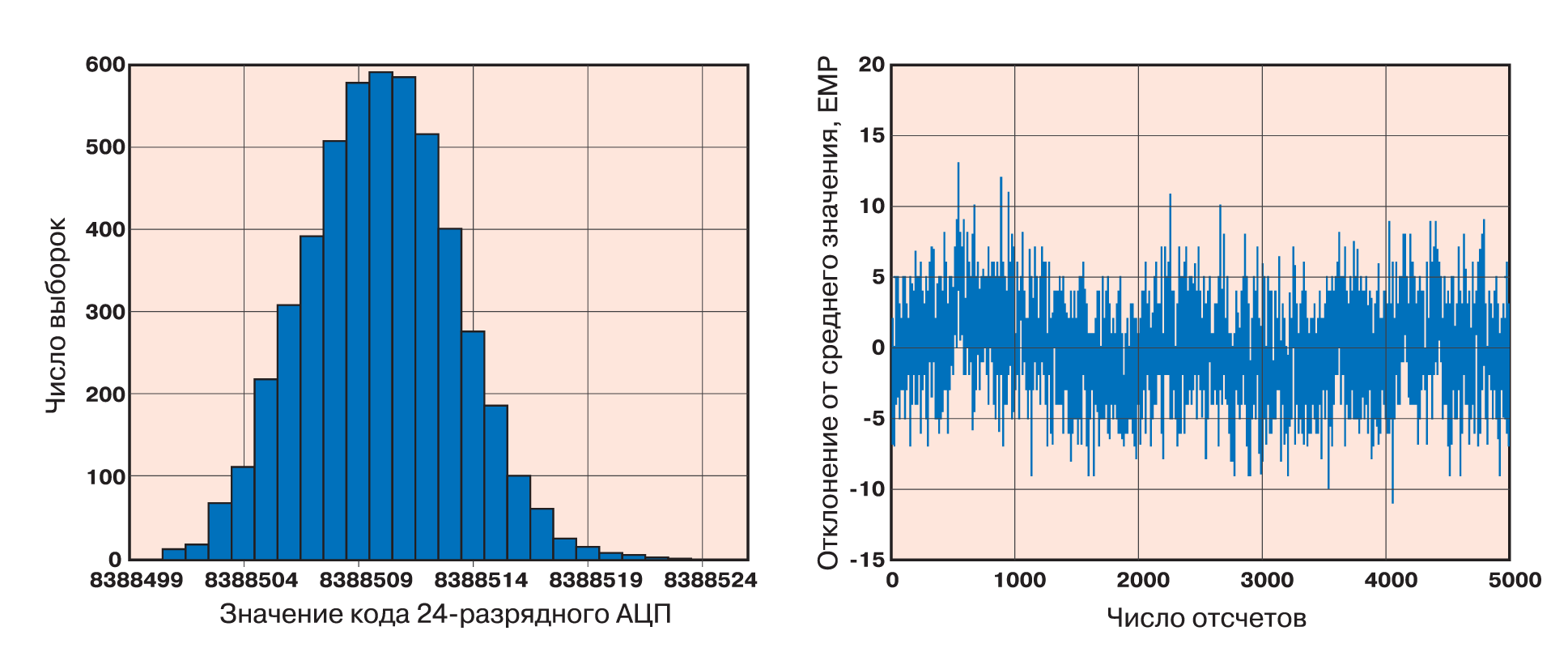
Рис. 5. Шум на выходе АЦП AD7799 при подключении на вход опорного источника: коэффициент усиления 64, частота выборки 4.17 Гц, напряжение опорного источника 5 В, среднеквадратичный уровень шумов 3.2526 ЕМР, эквивалентное разрешение 19.576 бит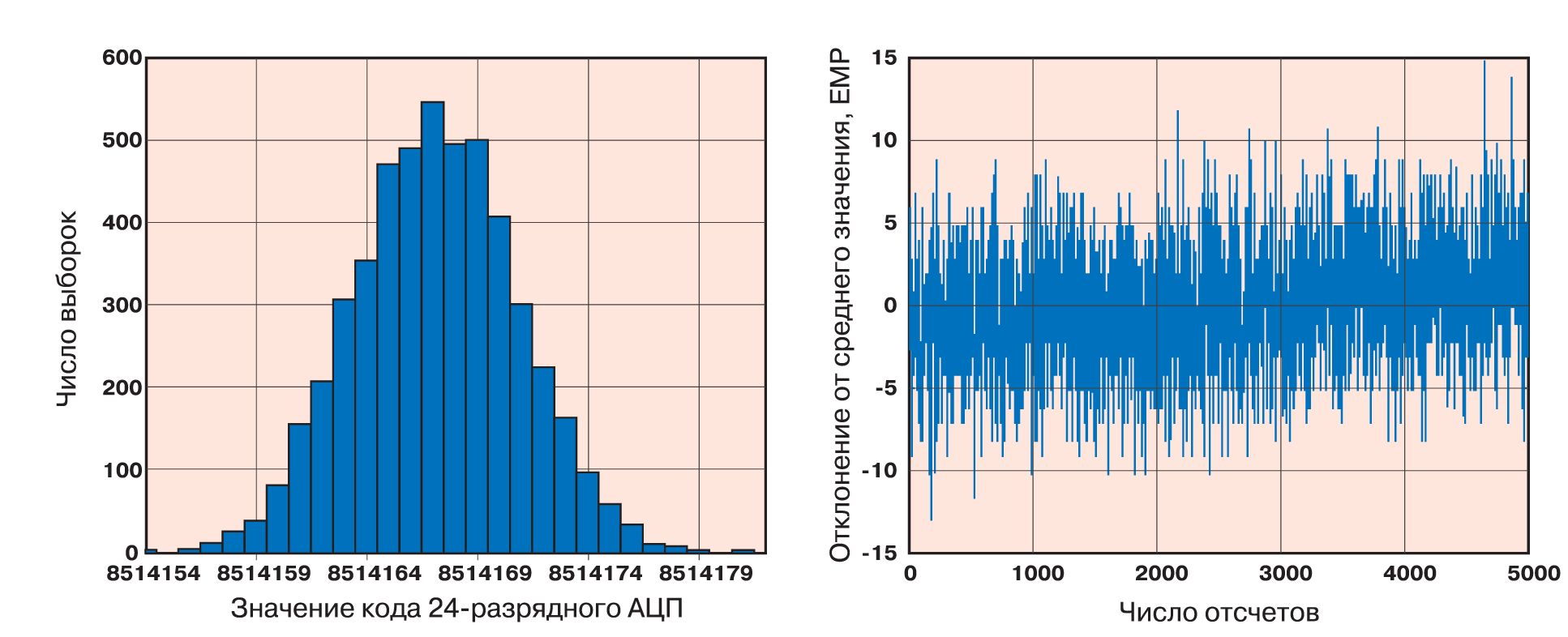
Рис. 6. Шум на выходе АЦП AD7799 при подключении на вход мостового датчика: коэффициент усиления 64, частота выборки 4.17 Гц, напряжение опорного источника 5 В, среднеквадратичный уровень шумов 3.6782 ЕМР, эквивалентное разрешение 19.399 бит
Уменьшить уровень шума на выходе АЦП можно усреднением отсчетов. Программа усреднения результатов преобразования может быть записана в память микроконвертера ADuC847 (см. рис. 4). На рис. 7 приведена типовая гистограмма распределения отсчетов сигма-дельта АЦП при заземленном входе. В идеальном случае все отсчеты были бы одинаковы. Однако шум АЦП приводит к распределению отсчетов на выходе АЦП по нормальному закону. Суммарный шум АЦП включает шум квантования и тепловой шум узлов преобразователя.
На рис. 8 приведена блок-схема алгоритма усреднения отсчетов АЦП. Алгоритм позволяет выделить минимальное и максимальное значения выходного кода из М отсчетов и среднее значение из этой выборки. На рис. 9 приведена гистограмма распределения отсчетов при подключении ко входу АЦП AD7799 мостового датчика.
Сравнивая результаты тестирования АЦП AD7799 без усреднения отсчетов (рис. 6) и с усреднением (рис. 9), видим, что разрешение в последнем случае увеличилось на 2.5 бита и составило 21.9 бита. Недостатком усреднения является увеличение длительности измерения.
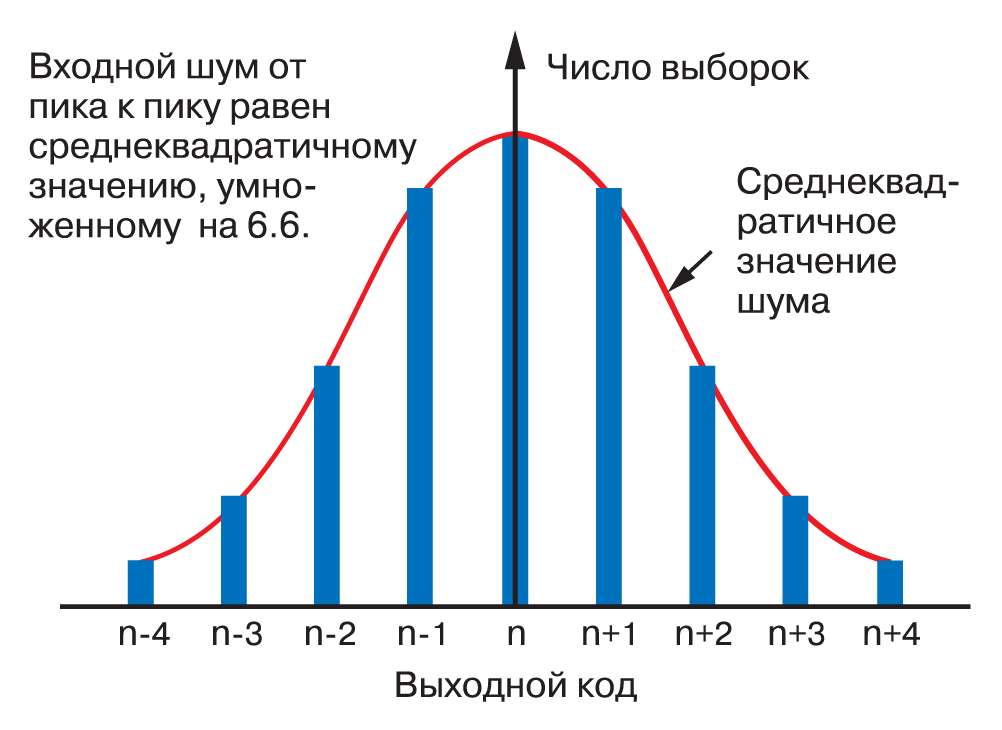
Рис. 7. Гистограмма распределения отсчетов АЦП
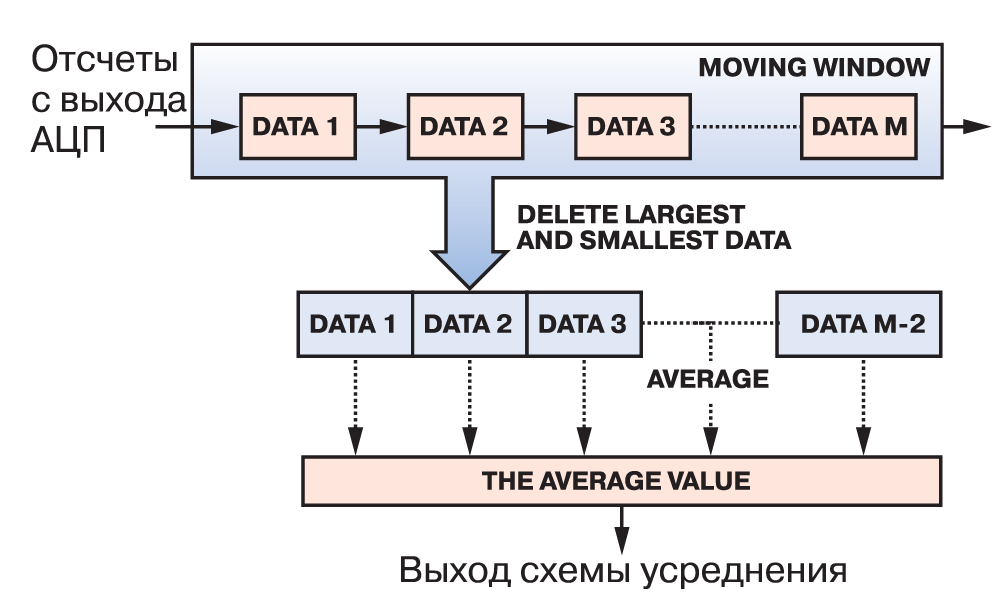
Рис. 8. Блок-схема алгоритма усреднения
Результаты сравнительного тестирования сигма- дельта АЦП AD7799 и сигма-дельта АЦП в составе микроконвертера ADuC847 приведены на гистограммах рис. 5 и 10 соответственно. Условия тестирования практически одинаковы. Как следует из результатов тестирования, шум АЦП AD7799 во много раз меньше шума АЦП в составе микроконвертера ADuC847.
Для улучшения передаточной характеристики измерительного канала весоизмерительной системы применяют логометрическое включение мостового датчика. В этом случае используется один и тот же опорный источник как для АЦП, так и для мостового датчика (см. рис. 3). Точность выходного напряжения мостового датчика определяется погрешностью его источника возбуждения, а точность АЦП – погрешностью опорного источника. Если используется один и тот же опорный источник для датчика и АЦП, то точность измерительного канала инвариантна к погрешности этого источника.
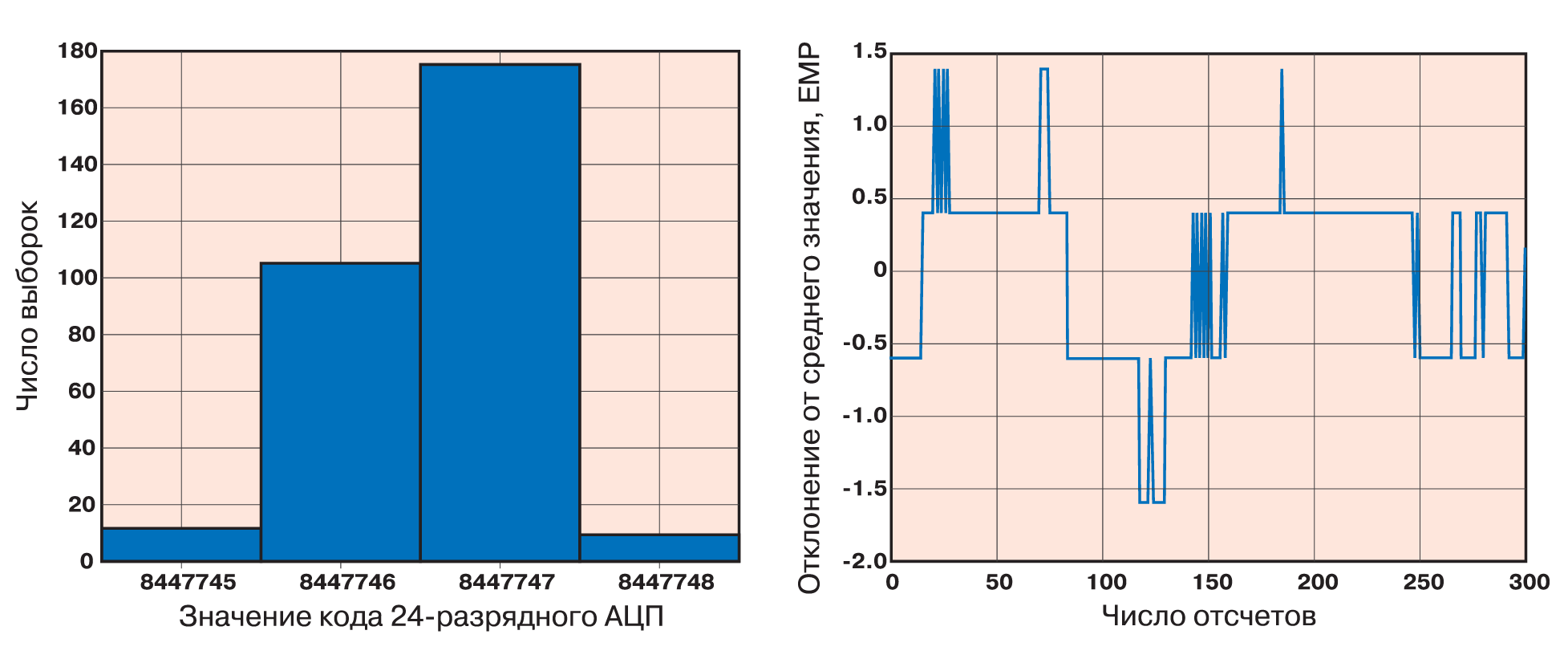
Рис. 9. Шум на выходе АЦП AD7799 после усреднения отсчетов: коэффициент усиления 64, частота выборки 4.17 Гц, напряжение опорного источника 5 В, среднеквадратичный уровень шумов 0.611 ЕМР, эквивалентное разрешение 21.9 бит
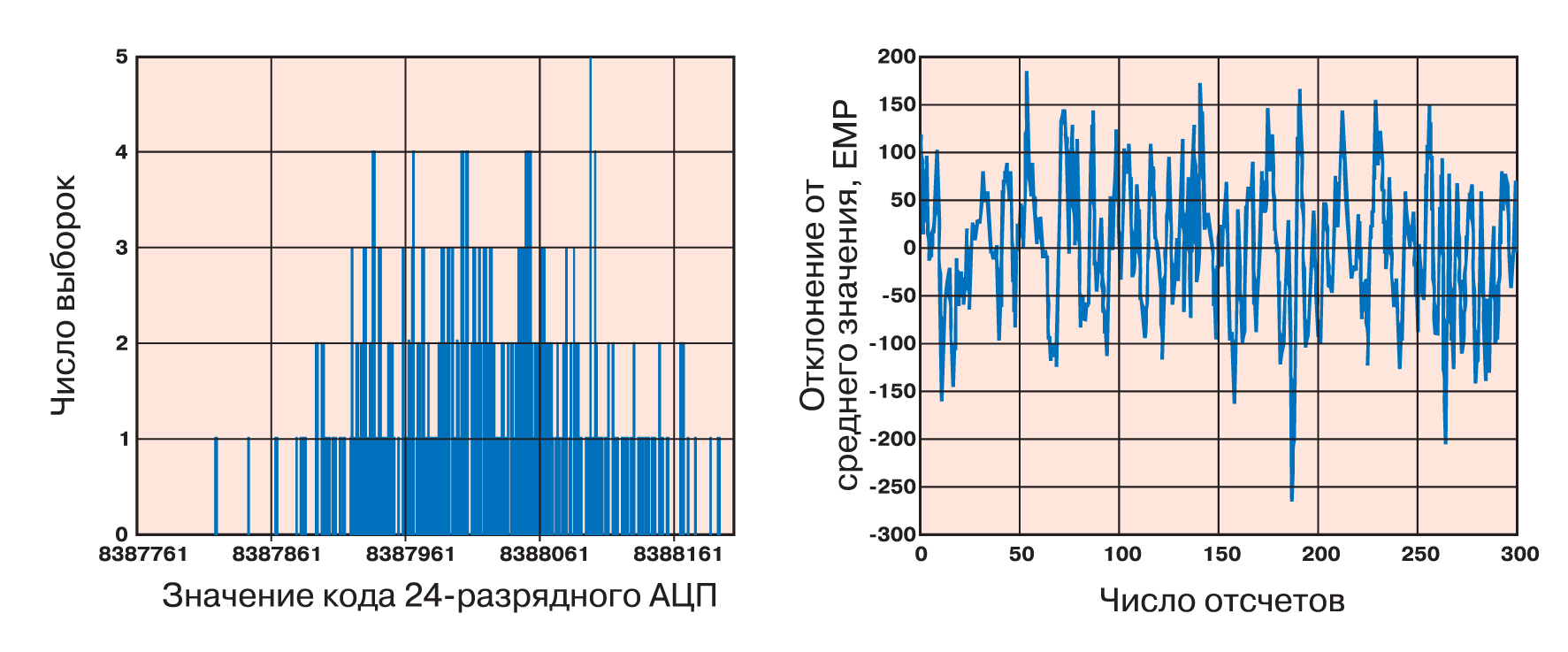
Рис. 10. Шум на выходе АЦП в составе ADuC847 при подключении на вход опорного источника: коэффициент усиления 64, частота выборки 5.35 Гц, напряжение опорного источника 2.5 В, среднеквадратичный уровень шумов 74.65 ЕМР, эквивалентное разрешение 15 бит
Для прецизионных весоизмерительных систем с низким уровнем входного сигнала важно качество разводки печатной платы. В первую очередь необходимо обратить внимание на разводку земляной шины и развязку цепей питания. Аналоговая и цифровая земляные цепи разводятся отдельными шинами. Земляной вывод АЦП AD7799 GND следует подключать к шине аналоговой земли. Между выводами AVDD (напряжение питания аналоговых цепей) и DVDD (напряжение питания цифровых цепей) следует включить дроссель, если используется общий источник питания. Для развязки цепей питания используются конденсаторы емкостью 0.1 и 10 мкФ (электролит), причем располагать их следует в непосредственной близости от корпуса ИМС АЦП.
Выводы
- В измерительных каналах высококачественных весоизмерительных систем следует использовать сигма-дельта АЦП. В этом случае мостовой датчик может быть подключен непосредственно ко входу АЦП.
- Для уменьшения влияния погрешности опорного источника следует применять логометрическое включение мостового датчика в измерительный канал весоизмерительной системы.
- Для снижения уровня шумов АЦП может быть использовано усреднение результатов преобразования на его выходе.
- Если точность весоизмерительных систем не должна превышать 14-15 двоичных разрядов, целесообразно использовать в измерительном канале микроконвертеры типа ADuC847 со встроенным сигма-дельта АЦП. В этом случае и преобразование, и усреднение результатов преобразования выполняются одной ИМС.
- Для обеспечения высокого качества весоизмерительных систем необходимо разводку печатной платы выполнять с учетом рекомендаций фирмы-производителя АЦП.