
Питання:
Чи можна для підвищення ефективності імпульсного джерела живлення змінити величину опору сенсорного резистора RSENSE, або видалити його компоненти фільтрації?
Відповідь:
Вибір величини опору RSENSE, який може бути занадто великим або малим, а також видалення компонентів фільтрації може призвести до погіршення ефективності джерела живлення та зростання рівня шуму на його виході. У статті розглядаються ускладнення, які виникають із реалізації зворотного зв’язку імпульсних стабілізаторів постійного струму, а також зосереджується увага на виборі величини опору сенсорного резистора RSENSE.
Резистор RSENSE має вирішальне значення для того, щоб контур зворотного зв’язку, який відповідає за підтримку стабільної вихідної напруги, отримував точний сигнал від струму індуктора. Якщо цей сигнал буде спотворений, пульсації індуктора можуть сприйматися більшими або меншими, ніж вони є насправді, в результаті чого контур зворотного зв’язку буде поводити себе непередбаченим чином.
Понижуючі перетворювачі у цій статті використовуються для демонстрації наслідків неправильного вибору величини опору сенсорного резистора, а також для того, щоб показати наслідки видалення компоненти фільтра RSENSE. Сенсорний резистор може мати неоптимальну величину опору, оскільки розробники намагаються підвищити ефективність імпульсного джерела живлення. Крім того, компоненти фільтра сенсорного резистора є критично важливими для зворотного зв’язку, який відповідає за стабільність напруги джерела живлення, і, якщо їх видалити, може зрости похибка вихідної напруги джерела живлення.
Що робить сенсорний резистор? Він перетворює струм, що виходить з котушки індуктивності або індуктора, на напругу. Це можна побачити на схемі понижуючого стабілізатора, наведеної на рис.1.
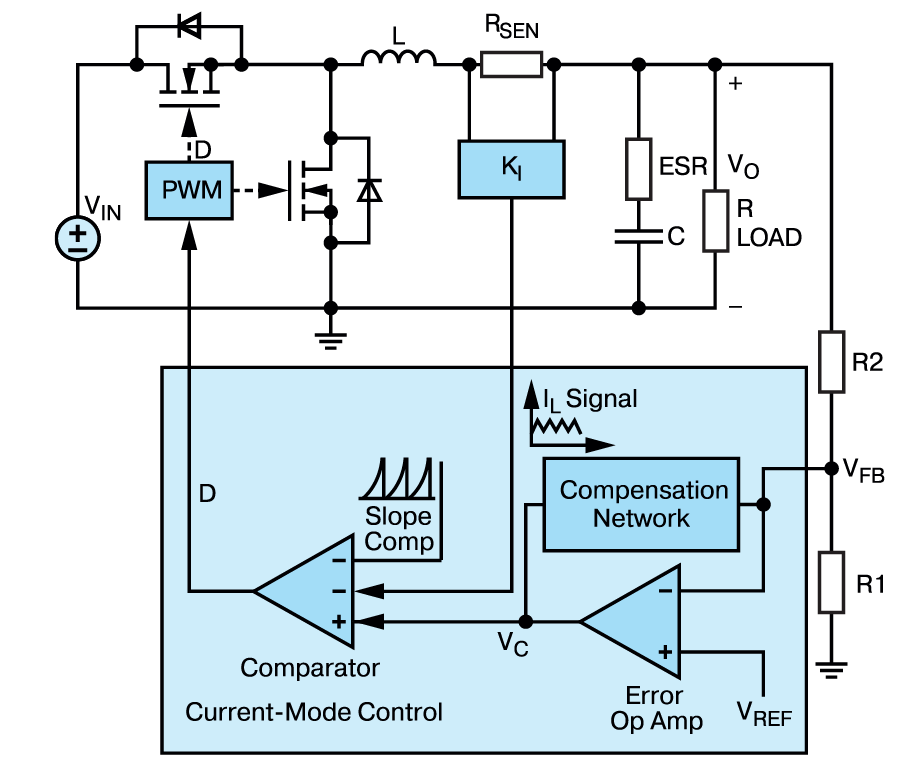
Рис. 1. Спрощена схема понижуючого стабілізатора з контуром зворотного зв’язку
Напруга на сенсорному резисторі діє як сигнал зворотного зв’язку для регулювання вихідної напруги стабілізатора або імпульсного джерела живлення у нашому випадку. Вибір оптимальної величини опору сенсорного резистора має вирішальне значення для точної роботи контуру зворотного зв’язку.
Ускладнення, які виникають від недостатньої величини опору сенсорного резистора. Розробники можуть зменшити значення опору сенсорного резистора, щоб досягти кращої ефективно джерела живлення. Сенсорний резистор включено послідовно з індуктором і виходом джерела живлення, щоб пристрій міг сприймати трикутну форму струму індуктора та використовувати його в контурі зворотного зв’язку. Втрати потужності в цьому резисторі визначаються рівнянням Ploss=I2L4RSENSE. Зменшивши опір сенсорного резистора, можна дещо підвищити ефективність джерела живлення. Однак, якщо опір сенсорного резистор занадто малий, сигнал від нього також буде занадто малим. Це призводить до зменшення співвідношення сигнал/шум SNR, оскільки шум стає близьким за величиною до перетвореного у напругу струму індуктора. При зменшенні SNR контур зворотного зв’язку більше не зможе достатньо ослабляти пульсації сигналу від індуктора, що призводить до появи додаткового шуму на виході джерела живлення. Зазвичай це спостерігається як тремтіння вихідного сигналу, яке можна побачити на рис. 2.
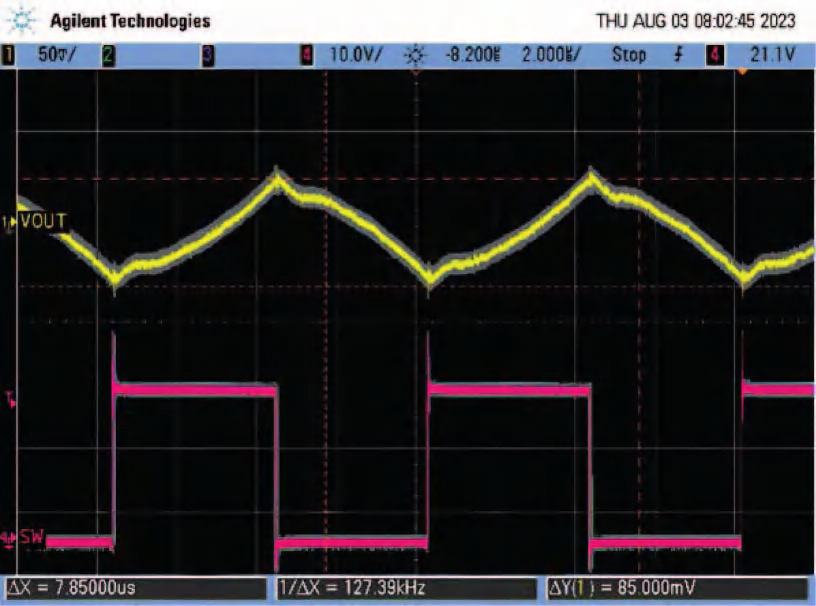
Рис. 2. Пульсації на виході джерела живлення спричинені зниженим опором RSENSE
Щоб виправити цей недолік, необхідно вибрати оптимальне значення опору RSENSE за формулою:
RSENSE=VSENSE(max)/Imax, (1)
де напруга VSENSE(max) визначається в технічній документації на джерело живлення, а Imax – це макси – мальний струм навантаження імпульсного джерела живлення.
Джерело живлення може працювати з максимальним струмом Imax, який визначається рівнянням (2) як сума 1/2 амплітуди пульсацій струму через котушку індуктивності та середнього струму навантаження, як показано на рис. 3.
Imax = Iload + iL/2. (2)
Вибір опору сенсорного резистора відповідно до (2) гарантує те, що його значення достатнє для необхідного ослаблення пульсацій струму котушки індуктивності.
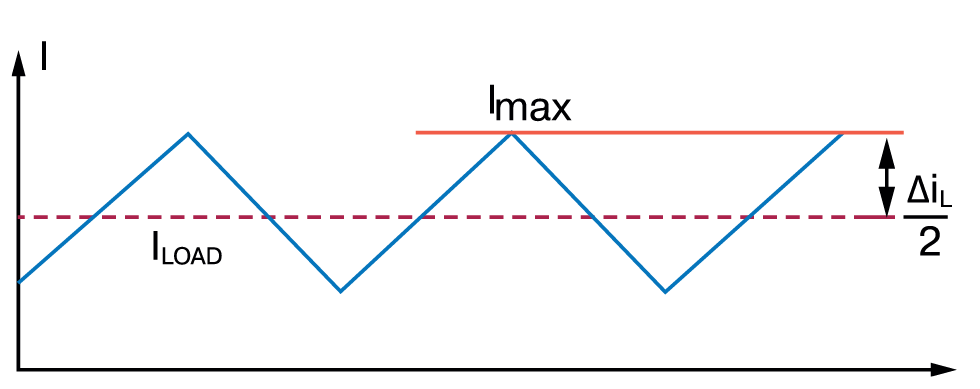
Рис. 3. Форма пульсацій струму котушки індуктивності
Ускладнення від надто великого опору сенсорного резистора. Розробники, як правило, не застосовують сенсорний резистор з великим опором. Однак на друкованій платі опір резистора з урахуванням опору провідникових доріжок може бути досить великим. Як правило, мікросхеми імпульсних джерел живлення мають функцію обмеження струму, яка визначається максимально допустимою напругою на сенсорному резисторі. Коли значення заданої максимальної напруги перевищено, ІМС джерела живлення переходить у режим обмеження струму, і вихідна напруга починає падати зі збільшенням струму навантаження. У цьому режимі стабілізатор не регулює вихідну напругу, як це можна побачити на рис. 4.

Рис. 4. Регулювання навантаження імпульсного джерела живлення при великому опорі сенсорного резистора
У розглянутому прикладі dc/dc перетворювач постійного струму у складі імпульсного джерела живлення має номінальний струм до 15 А, але схема припиняє регулювання вихідної напруги джерела приблизно на рівні 4 А при завеликому опору сенсорного резистора. Це може виникнути, коли доріжки між індуктором та сенсорним резистором довші, ніж вони повинні бути. Оскільки опір вибраного сенсорний резистор знаходиться в діапазоні міліомів, сенсорний резистор дуже чутливий до будь-якого додаткового опору. Запобігти цій проблемі можна за допомогою з’єднання Кельвіна, яке показано на рис. 5.

Рис. 5. Приклад з’єднання Кельвіна для сенсорного резистора
За цим з’єднанням провідникові доріжки до сенсорного резистора відокремлені від контактної площадки друкованої плати та струмопровідних доріжок. Доріжки Кельвіна розташовані якомога ближче до сенсорного резистора, щоб уникнути додаткового паразитного опору. Це дозволяє напрузі VSENSE бути точним відображенням лише напруги на сенсорному резисторі. Таким чином, коли сенсорний резистор збільшується через довгі траси провідникових доріжок та відсутність з’єднань Кельвіна, обмеження струму спрацьовує при менших навантаженнях, оскільки напруга VSENSE(max) досягається набагато раніше, що призводить до гіршого регулювання навантаження імпульсного джерела живлення.
Що таке паразитна еквівалентна послідовна індуктивність (ESL)? Через низьке значення опору сенсорного резистора (яке знаходиться в діапазоні міліом), паразитна еквівалентна послідовна індуктивність (ESL), яка є властивою характеристикою резисторів для поверхневого монтажу, має помітний вплив на величину опору сенсорного резистора. Тому відповідний RC-фільтр повинен бути доданий до сенсорних доріжок, щоб звести до мінімуму ефект паразитного індуктивності ESL. Додамо, що ESL складається не лише з паразитної індуктивності сенсорного резистора, а й із загальної паразитної індуктивності, спричиненої не дуже вдалим компонуванням друкованої плати. ESL можна розрахувати за рівнянням (3):
ESL = (VESL(step)/ ∆iL)x(ton × toff)/ (ton + toff), (3)
де VESL(step) — це додана напруга на сенсорному резисторі.
Фільтр повинен мати постійну часу RC, яка дорівнює або є меншою за розраховану постійну часу сенсорного резистора (ESL/R). Коли цей фільтр видалити, сенсорний резистор буде включати крім ре- зистивних ще індуктивні характеристики. Це можна спостерігати за стрибками напруги на сенсорному резисторі, як показано на рис. 6.
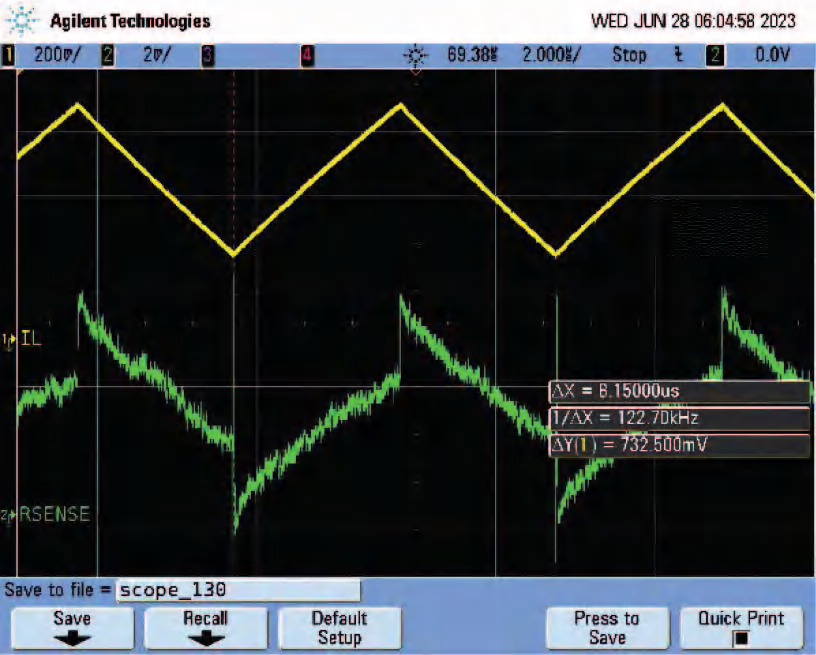
Рис. 6. Стрибки напруги на сенсорному резисторі RSENSE без фільтра
Крім того, через збільшення пульсацій на виході джерела живлення схема, яка обмежує струм, помилково припускає, що струм досяг рівня обмеження при нижчому номінальному навантаженні, що призводить до порушення регулювання вихідної напруги при нижчих за задане значеннях струму навантаження, як це показано на рис. 7.

Рис. 7. Регулювання навантаження джерела живлення без фільтра
У даному прикладі конкретне джерело живлення розраховано на струм до 15 А, але обмежуюча схема припиняє регулювання напруги при струмі навантаження 12 А. Проблему можна вирішити, додавши відповідний фільтр. Параметри фільтру можна визначити за рівнянням на рис. 8.

Рис. 8. Схема сенсорного резистора з паразитною індуктивною та рівняння розрахунку RC-фільтра для компенсації впливу паразитної індуктивності
Порівняно з сигналом через сенсорний резистор без фільтра RC-фільтр згладжує цей сигнал і усуває вплив паразитної індуктивності ESL. Індуктивні стрибки зникають, і форма хвилі виглядатиме трикутною, як це можна побачити на рис. 9.
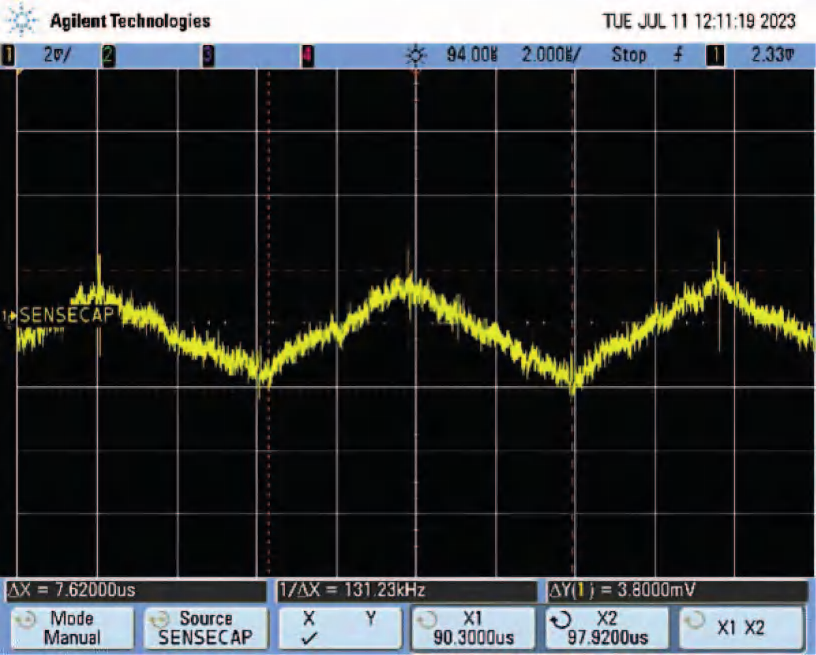
Рис. 9. Форма напруги на резисторі RSENSE при наявності RC-фільтра
ВИСНОВКИ
В статті показано, що від величини опору сенсорного резистора RSENSE залежить стабільність вихідної напруги імпульсного джерела живлення при змінних навантаженнях. Використання неоптимального опору сенсорного резистора RSENSE призводить до зменшення як регульованої вихідної напруги, так і відношення сигнал/шум на виході імпульсного джерела живлення. Наявність RC-фільтра у ланцюгу сенсорного резистора усуває пульсації, що викликані паразитною індуктивністю як самого сенсорного резистора, так і паразитної індуктивності провідникових доріжок на друковані платі.