
Сучасні АЦП, що відрізняються високим розрізненням, становлять високоомну нагрузку за постійним струмом (до кількох сотень Ом) і швидкозмінну динамічну нагрузку на змінному струмі для датчиків та інших джерел сигналів. Такий характер навантаження, що створюється сучасними АЦП, призводить до виникнення значних похибок при кодуванні сигналів.
Для усунення цих похибок на вході АЦП використовують драйвери, виконані на основі високоякісних ОП з малим часом встановлення вихідного сигналу. Ці підсилювачі мають вхідний імпеданс до кількох мегаом і мінімальний вихідний імпеданс, що дозволяє практично виключити вплив зміни вхідного опору АЦП на точність перетворення сигналів датчиків. Крім того, ОП на вході АЦП дозволяє узгоджує рівні сигналів датчиків з вхідним діапазоном перетворювача, а також зменшує рівень шумів на вході АЦП шляхом їх фільтрації. Якщо датчик є однопровідним, а вхід АЦП диференціальним, драйвер також забезпечує узгодження такого датчика з перетворювачем.
При виборі ОП як вхідного драйвера АЦП слід мати на увазі, що характеристики підсилювача за точністю, рівнем шумів та спотворень, а також часом встановлення вихідного сигналу повинні суттєво перевищувати аналогічні параметри АЦП.
Це викликає певні труднощі, якщо використовується швидкодійний АЦП послідовного наближення з розрізненням 16–18 двійкових розрядів. Нижче викладено вимоги до визначення параметрів ОП на основі відомих характеристик АЦП.
Вимоги до часу встановлення вихідного сигналу ОП
Для того щоб повністю використовувати можливості АЦП за швидкістю вибірки вхідного сигналу, загальний час встановлення драйвера на основі ОП та перетворювача з точністю 1 LSB при повному розмаху вхідного сигналу має бути меншим за час перетворення, що визначається виходячи з максимальної частоти вибірки АЦП. Це особливо важливо, якщо АЦП підключений через комутатор до кількох джерел вхідного сигналу. Так, наприклад, загальний час встановлення ОП та АЦП має бути меншим за 1 мкс для швидкодійного 16-розрядного АЦП з частотою вибірки 1 МГц (що має місце для 16-розрядного АЦП з диференціальним входом AD7677 або АЦП з біполярним входом AD7671), а також меншим за 1,25 мкс для 18-розрядного АЦП з частотою вибірки 800 кГц (що має місце для АЦП AD7674).
На жаль, у технічних описах (data sheet) підсилювачів такий параметр, як час встановлення, нормується для точності встановлення 0,1 % або 0,01 % при повному розмаху вхідного сигналу, тоді як для 16-розрядного АЦП необхідно знати час встановлення вихідного сигналу ОП з точністю 0,0015 %, а для 18-розрядного АЦП – з точністю 0,0004 %. Тому для вибору підсилювача із заданим часом і точністю встановлення розробнику слід самостійно визначити ці параметри або застосовувати ОП із зовнішнім ланцюгом частотної корекції. Так, наприклад, ОП AD8021 має паспортний час встановлення вихідного сигналу 23 нс з точністю 0,01 %, проте, крім внутрішньої коректуючої ємності, в ньому може бути використаний зовнішній ланцюг корекції, що дозволяє забезпечити максимальну смугу частот при мінімальному рівні шумів та спотворень. У цьому випадку час встановлення підсилювача задається виходячи з розрядності АЦП не тільки для одиничного коефіцієнта підсилення ОП, але й для коефіцієнта підсилення більше одиниці.
Вимоги до рівня шумів ОП
Шум, що генерується драйвером на основі ОП, має бути нижчим за шум АЦП, щоб не погіршувати параметри пристрою загалом. У разі використання АЦП AD7671 рівень шуму, що генерується підсилювачем, зменшується за допомогою вбудованого у АЦП вхідного дільника. Відношення сигнал/шум (SNR) системи «підсилювач–АЦП» можна визначити з виразу
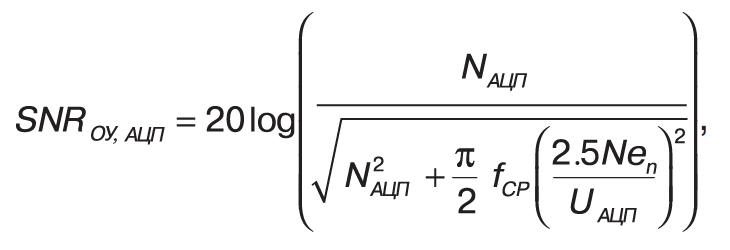
де NАЦП – середньоквадратичний рівень шумів АЦП в мкВ, fср – частота зрізу АЦП в МГц, N – коефіцієнт підсилення ОП, eп – спектральна густина вхідного шуму ОП в нВ/√Гц, UАЦП – розмах вхідного сигналу АЦП в В.
Якщо як ОП використовується AD8021, а як АЦП – AD7671, то рівень шумів на вході АЦП становить 28 мкВ, частота зрізу АЦП 9,6 МГц, розмах вхідного сигналу АЦП 5 В, спектральна густина вхідного шуму ОП 2 нВ/√Гц. При одиничному коефіцієнті підсилення ОП відношення SNRОУ_АЦП лише на 0,08 дБ перевищує відношення SNRАЦП.
Вимоги до рівня нелінійних спотворень ОП + АЦП
Підключення АЦП безпосередньо до датчика з високим вихідним імпедансом може призвести до зростання нелінійних спотворень. Особливо це проявляється на змінному струмі у зв’язку з тим, що вхідний імпеданс сучасних АЦП має ємнісний характер, причому ємність на вході АЦП відрізняється високою нелінійністю. Зменшити нелінійні спотворення можна за допомогою драйвера на вході АЦП, при цьому слід мати на увазі, що нелінійні спотворення самого драйвера мають бути меншими за нелінійні спотворення АЦП. На рис. 1 представлено залежність нелінійних спотворень від величини вхідного сигналу для ОП AD8021 (вхідного драйвера) та АЦП AD7671 при максимальному розмаху вхідного сигналу від 0 до 2,5 В. На частотах 20 та 200 кГц рівень нелінійних спотворень не перевищує –100 дБ.

Підключення драйвера до АЦП з несиметричним входом
На рис. 2 показана 16-розрядна система збору даних на основі драйвера (AD8021) та АЦП (AD7671). Драйвер є повторювачем з високим вхідним імпедансом, що дозволяє підключити до його входу пасивний фільтр або комутатор. Резистор номіналом 50 Ом у ланцюзі зворотного зв’язку забезпечує стійкість роботи ОП. Фільтр на виході повторювача, що містить резистор опором 15 Ом та конденсатор ємністю 2,7 нФ, дозволяє знизити рівень шумів. Як джерело опорного напруги використано ІМС ADR421 з малим ТКН. У зв’язку з тим, що АЦП побудований на основі комутованих конденсаторів, на виході джерела опорної напруги використовується фільтр, що знижує рівень викидів в урівноважувальному ланцюзі перетворювача. Для зменшення рівня перешкод за ланцюгами живлення в АЦП використано три роздільні джерела живлення: джерело живлення аналогових вузлів напругою 5 В, джерело живлення цифрових вузлів напругою 5 В та джерело живлення пристроїв вводу/виводу, напруга якого може перебувати в межах від 2,5 до 5,25 В. Динамічні характеристики системи збору даних представлено на рис. 3, 4, зокрема на рис. 3 показано вихідну спектральну характеристику АЦП при частоті вхідного сигналу 45 кГц, а на рис. 4 – залежність нелінійних спотворень АЦП, амплітуди другої та третьої гармонік, а також динамічного діапазону неискаженного сигналу від частоти вхідного сигналу.

Підключення драйвера до АЦП з диференціальним входом
У системі збору даних (рис. 2) використано включення АЦП з несиметричним входом, проте на основі драйвера (AD8021) нескладно забезпечити перетворення несиметричного сигналу в симетричний або диференціальний сигнал і таким чином повністю використовувати можливості АЦП AD7677 з диференціальним входом. Система збору даних із симетричним включенням АЦП наведена на рис. 5. Шляхом зміщення вихідного діапазону датчика, яке забезпечується за допомогою джерела опорної напруги, на вхід АЦП надходить симетричний сигнал розмахом від –2,5 до 2,5 В. Таке включення АЦП дає змогу суттєво послабити синфазну перешкоду (рис. 6).


Підсилювач із зовнішнім ланцюгом частотної корекції
У підсилювачі AD8021, як було зазначено вище, передбачено ланцюг зовнішньої високочастотної корекції. Слід зазначити, що більшість сучасних ОП, що випускаються сьогодні, таких ланцюгів не мають. У них використовується внутрішній конденсатор для забезпечення стійкої роботи у разі, якщо ОП охоплений негативним зворотним зв’язком (НЗЗ). Проте величина внутрішньої ємності вибирається з великим запасом, що призводить до суттєвого зменшення смуги частот при збільшенні коефіцієнта підсилення ОП з НЗЗ. Так, наприклад, якщо при одиничному підсиленні частота зрізу ОП з внутрішньою високочастотною корекцією становить 200 МГц, то при коефіцієнті підсилення, рівному 10, частота зрізу зменшується до 20 МГц. Водночас при зменшенні величини внутрішньої ємності смуга частот при коефіцієнті 10 збільшується, але порушується стійкість роботи ОП при одиничному коефіцієнті підсилення. Тому наявність спеціального виводу для підключення зовнішньої коректуючої ємності (як це було в перших ОП) дозволяє забезпечити стійку роботу підсилювача при заданому коефіцієнті підсилення та максимальній частоті зрізу.
В підсилювачі AD8021 величина внутрішньої коректуючої ємності становить 1,5 пФ, причому цей конденсатор забезпечує стійку роботу ОП, починаючи з коефіцієнта підсилення 10 і вище. Якщо ж коефіцієнт підсилення AD8021 з НЗЗ нижче 10, то стійкість роботи цього підсилювача забезпечується зовнішньою ємністю СС (рис. 5).


Таким чином, використання ОП з високими характеристиками як вхідних драйверів швидкодіючих прецизійних АЦП дозволяє знизити рівень шумів та спотворень на вході АЦП, забезпечити узгодження сигналів датчиків з вхідним діапазоном АЦП, не погіршуючи при цьому динамічні та метрологічні параметри самого АЦП.