
Землетруси становлять серйозну загрозу для промислових і житлових районів, а також для всіх типів споруд. У міру збільшення цих територій і будівництва будівель сейсмічний моніторинг потребує впровадження розгалуженої мережі сенсорів.
Технології сенсорів
Використання акселерометрів на базі MEMS- технології і сейсмоприймачів малого розміру дозволяє розробити прості рішення Інтернету речей для мережі сейсмічних сенсорів.
Мережі сейсмічних сенсорів можуть бути використані для моніторингу не тільки землетрусів, але й визначення стану інфраструктурних об’єктів, таких як промислові будівлі, електростанції, нафтопереробні заводи і т.і. у тому числі в умовах бойових дій.
Д. Сантос, А. Катапанг, Е. Рейта
Оскільки світ стає все більш взаємопов’язаним і взаємозалежним, помірні та сильні землетруси можуть спричинити значні економічні збитки та втрати. Сильний землетрус у будь-якому міському центрі матиме миттєвий вплив на економіку цього центру та на здатність його підприємств надавати послуги . Ризик землетрусу є глобальною проблемою, яку можна вирішити вдосконаленням сейсмічного моніторингу.
Одним із ключових факторів удосконалення сейсмічного моніторингу є впровадження мережі сейсмічних сенсорів, що вимагає широкого розгортання та взаємодії сейсмічних приладів. Однак вартість і складність встановлення традиційних сейсмічних сенсорів та приладів досить велика.
Роль Інтернету речей
Застосування технології Інтернету речей або IoT забезпечує недороге рішення при збереженні стандартної якості сейсмічних даних. У цій статті обговорюється фізика землетрусів і сенсори руху землі, а також сучасні технології інтернету речей з вимогами до відповідних приладів і функцій.
Фізика землетрусів
Землетрус – це подія, спричинена рухом і зіткненням тектонічних плит. Енергія, що утворюється в результаті зіткнень, поширюється через поверхню землі та навколо неї у вигляді сейсмічних хвиль. Ці хвилі надходять у кількох напрямках і класифікуються як об’ємні та поверхневі хвилі (рис. 1).
Існує два типи поверхневих хвиль: первинні (P- хвилі) і вторинні (S-хвилі). Р-хвилі розповсюджуються вздовж напрямку поширення у вигляді серії стиснень і розріджень. Незважаючи на те, що вони мають найбільший спад енергії серед інших типів хвиль, вони є найшвидшими, маючи швидкість у діапазоні від 5 до 8 км/с.
Швидкий спад енергії також робить їх найменш руйнівним типом хвилі. P-хвилі можуть поширюватися не тільки через поверхню, але також через воду або рідину. S-хвилі або зсувні хвилі слідують одразу після приходу P-хвиль. Вони рухаються вздовж поверхні землі зі швидкістю приблизно від 60 до 70% від P-хвиль. Цей тип хвилі поширюється ортогонально до напрямку поширення та поверхні Землі.
S-хвилі більш руйнівні, ніж P-хвилі через їх менший спад енергії. Поверхневі хвилі на 10% повільніші, ніж об’ємні, але вони найбільш руйнівні. Варто зазначити, що швидкість розповсюдження сейсмічних хвиль значно змінюється залежно від типу ґрунту, в якому вони поширюються .
Поверхневі хвилі складаються з хвиль Релея та Лава. Хвилі Релея – це тип поверхневих хвиль, які поширюються біля поверхні Землі у вигляді збурень і викликають обертання, яке може бути поступальним (вздовж напрямку розповсюдження) або ретроградним (проти напрямку розповсюдження).
За характером їхнього руху їх також називають ґрунтовим креном. З іншого боку, хвилі Лава поширюються ортогонально напрямку поширення, але паралельно поверхні Землі. На рис. 1 показано різні типи хвиль та їх вплив на поверхню ґрунту.
 первинні хвилі; (б) вторинні хвилі; (в) хвилі Лава; (г) Хвилі Релея")
Магнітуда, інтенсивність та спектральна інтенсивність.
Магнітуду та інтенсивність землетрусу зазвичай помилково приймають за одне і теж. Ці параметри можуть бути пов’язані, але це два різні параметри землетрусу. Інтенсивність землетрусу, або просто інтенсивність, залежить від властивостей місця, де проводилися вимірювання та описує вплив землетрусу на певну територію і традиційно використовується в усьому світі як метод кількісної оцінки характеру поштовхів і масштабу збитків.
Отже, інтенсивність землетрусу не має одного справжнього значення. Значення інтенсивності землетрусів відповідають модифікованій шкалі інтенсивності Меркаллі (від 1 до 12 балів) або шкалі Россі-Фореля (від 1 до 10 балів). Однак зараз у всьому світі переважно використовується модифікована інтенсивність Меркаллі (MMI). Табл. 1 показує значення інтенсивності з відповідним описовим ефектом у модифікованій шкалі Меркаллі, наданій Геологічною службою США (USGS).
Таблиця 1. Скорочена модифікована шкала інтенсивності Меркаллі, MMI MMI
| Шкала | Описовий ефект |
| I | Відчувається за особливо сприятливих умов |
| II | Відчувається лише кількома людьми у стані спокою, особливо на верхніх поверхах будівель |
| III | Відчувається людьми в закритих приміщеннях, особливо на верхніх поверхах будинків |
| IV | Відчувається багатьма в приміщенні, декількома на вулиці протягом дня |
| V | Відчувається майже всіма |
| VI | Відчувають всі, пошкодження незначні |
| VII | Значні пошкодження в погано побудованих або погано спроєктованих спорудах |
| VIII | Значні пошкодження великих будівель із частковим обвалом |
| IX | Значні пошкодження спеціально розроблених конструкцій; добре спроектовані каркасні конструкції, викинуті зі схилу; великі пошкодження великих будівель із частковим обвалом |
| X | Деякідобре побудовані дерев’яні конструкції знищено; більшість мурованих і каркасних конструкцій зруйновано разом з фундаментами |
| XI | Небагато, якщо взагалі є, мурованих споруд залишається стоячи; зруйновані мости; рейки сильно погнуті. |
| XII | Загальне руйнування; все спотворене |
Існує багато методів визначення інтенсивності землетрусу . Ці методи використовують дані, зібрані під час минулих землетрусів, і мають відповідні рівняння прогнозування руху землі (GMPE) для прогнозування значень інтенсивності. Отримані рівняння використовують принаймні один рух або комбінацію параметрів руху ґрунту, а саме пікове зміщення ґрунту (PGD), максимальну швидкість ґрунту (PGV) і пікове прискорення ґрунту (PGA). Попередні рівняння, як правило, базувалися на основі параметра PGA з кількома випадками, які використовують параметри PGV і PGD.
Незважаючи на те, що параметр GMPE використовує дані з багатьох баз даних для визначення кореляції, значення, отримані різними методами, значно відрізняються. Наприклад, значення прискорення PGA 10 см/с2 з використанням GMPE Wald призводить до значення MMI 3.2. Крім того, GMPE Hershberger класифікує значення PGA 10 см/с2 до значення MMI 4,43. Відмітимо, що більшість параметрів GMPE підпорядковується степеневому закону, тому експоненціальне збільшення значення PGA потрібне для ступінчастого збільшення значення шкали MMI. Кореляційні рівняння (1), які отримані Валдом і Гершбергером, відображають прогнозування руху землі: (a) за Валдом, (б) за Гершберге- ром :
MMI =2.2log(PGAmax) + 1,
(1)
MMI =2.33log(PGA) + 1.5.
Японське метеорологічне агентство (JMA) розробило шкалу інтенсивності сейсмічної активності, яку можна обчислити на основі даних прискорення за трьома осями прискореного руху . Для цього використано перетворення Фур’є для сигналу прискорення від кожної осі. До частотного сигналу по кожній осі застосовується смуговий фільтр з характеристикою, наведеною на рис. 2. Також на цьому рисунку є математичне представлення характеристики для кожного з фільтрів a, б, в.
 рівняння для фільтра періоду; (б) рівняння фільтра високої частоти; (в) рівняння фільтра низької частоти")
Після зворотного перетворення Фур’є відфільтрованого частотного сигналу по кожній осі обчислюється величина векторної суми результуючого сигналу у часовій області для всіх трьох осей. Найвище значення прискорення, яке виникає протягом 0,3 секунд або більше, позначається як a0. Інструментальна сейсмічна інтенсивність потім обчислюється з a0 за допомогою рівняння (2), яке відображає сейсмічну інтенсивність JMA з використанням найвищого прискорення тривалістю щонайменше 0,3 секунди .
IJMA = 2loga0 +0/94, (2)
де IJMA — сейсмічна інтенсивність, a0 – найбільше прискорення для 0.3 с чи більше.
Спектральна інтенсивність землетрусу.
У той час як інтенсивність землетрусу залежить від його ефекту, який відчувається в певному місці, спектральна інтенсивність (SI) є мірою величини руйнівної енергії, накладеної землетрусом на конкретну структуру . Значення SI обчислюється за спектром відгуку швидкості з використанням рівняння (3).

де SI – спектральна інтенсивність, Sv(T,h) – зсув спектру швидкості у частотному діапазоні h з періодом T.
Дуже жорсткі конструкції мають нормальний період швидкості від 1,5 до 2,5 с. Оскільки значення SI працює зі спектром швидкості струсу, воно можелегко відрізнити сейсмічну активність, яка викликана землетрусом, від інших джерел.
Таким чином, значення SI можна використовувати як стандарт впливу землетрусу на стан конструкції будівлі. Крім того, порівняно з інтенсивністю сейсмічної активності JMA, значення SI передбачає менш складне обчислення, що робить його більш придатним використання у додатках з низьким енергоспоживанням. Рівняння (3) відображає спектральну інтенсивність з використанням спектру відгуку швидкості струшування, інтегрованого за період нормальної швидкості будівлі .
Магнітуда землетрусу, або просто магнітуда, являє собою кількість енергії, вивільненої під час землетрусу в його джерелі або гіпоцентрі. Її величина не залежить від місця вимірювання. Насправді вона має лише одне справжнє значення за шкалою Ріхте- ра. Найсильнішим землетрусом, який будь-коли було зареєстровано був землетрус у Вальдівії, Чилі, у 1960-х роках з магнітудою від 9,4 до 9,6 балів за шкалою Ріхтера. Кореляція між магнітудою та інтенсивністю землетрусу досі ще не повністю визначена. Встановлення певного зв’язку між ними залежить від багатьох факторів, таких як глибина гіпоцентру, склад ґрунту навколо гіпоцентру, тип рельєфу між епіцентром і вимірювальним пристроєм, а також розташування пристрою або його відстань від епіцентру.
Наприклад, у травні 2017 року було визначено, що землетрус, який стався біля узбережжя штату Орегон, мав магнітуду 4 бали за шкалою Ріхтера. Згідно з картою поштовхів USGS за липень 2017 року штат Монтана відчув землетрус із рівнем інтенсивності від 5 до 6 балів, тоді як Айдахо відчув той самий землетрус лише з рівнем інтенсивності від 2 до 3 балів. Це показує, що навіть якщо Айдахо знаходиться ближче до епіцентру порівняно з Монтаною, зовсім не обов’язково, що ефект землетрусу в Айдахо буде відчуватися сильніше.
Сейсмічне зондування
Сейсмічне зондування – це процес вимірювання та аналізу сейсмічних хвиль. Сейсмічні хвилі стосуються не тільки рухів, викликаних землетрусами; будь-яка сила, прикладена до землі, навіть така легка, як ходьба, може спричинити збурення, достатнє для виникнення сейсмічних хвиль.
Діапазон рухів землі, який визначають системи моніторингу землетрусів, дуже великий. Землетруси можуть сформувати рухи землі тонкими, як папір, або висотою з кімнату. Рух землі можна охарактеризувати переміщенням, швидкістю та прискоренням. Зміщення землі вимірюється відстанню, яку пройшла поверхня землі. Зміна положення може бути як горизонтальною, так і вертикальною. Швидкість ґрунту – це те, на яку відстань була переміщена поверхня, тоді як прискорення ґрунту – це те, наскільки швидко змінюється швидкість ґрунту з часом.
Прискорення землі є найважливішим фактором у визначенні напруги, викликаної конструкціями під час землетрусів. Зв’язок між величиною, рухом землі та інтенсивністю показано в презентації GeoSIG . Пристрої, що використовуються для сейсмічного зондування, дуже специфічні. Програми, які включають сейсмічне зондування, можна класифікувати на основі їхніх діапазонів частот. Тому прилади поставляються разом з кривими частотної характеристики, що відповідають умовам їхнього використання. Ілюстрацію різних застосувань приладів сейсмічного зондування з їх частотними характеристиками наведено на діаграмі GeoSIG .
Огляд сучасних сейсмометрів і наземних сенсорів.
Сейсмічні сенсори, які зазвичай називаються сейсмометрами, еволюціонували від використання традиційного пера або маятника до використання електронних або електромеханічних сенсорів. Удосконалення в розробці цих сенсорів призвело до створення приладів із різноманітними діапазонами робочих частот, механізмами чутливості та вимірюваними параметрами руху землі.
Сейсмометри деформації.
Історичні сейсморозвідувальні прилади можуть реєструвати лише зміщення землі. Технологічний прогрес зробив можливим використання різних механізмів для вимірювання зміщення землі. Деформаційний сейсмометр або тензометр зазвичай відноситься до приладів, які записують і вимірюють зміщення між двома точками землі .
Традиційні прилади використовували суцільний стрижень, закопаний або встановлений у свердловині. Стрижень зазвичай наповнений кварцом або іншим матеріалом, дуже чутливим до деформації. Зміна, наприклад, довжини пояснюється невеликими зміщеннями, спричиненими рухом землі. Інший тип сейсмометра називається об’ємним тензометром, у якому використовується встановлений у свердловині циліндр із трубкою, заповненою рідиною . Деформація об’єму циліндру спричиняє зміну рівня рідини. Сенсор зміщення рівня рідини перетворює цей параметр на зміщення землі. Не потребуючи спеціальних матеріалів, необхідних для традиційних приладів, об’ємний тензометр, як правило, використовується в польових умовах. Сучасні досягнення в лазерній технології дозволили створити лазерний інтерферометр, який значно розширює точність вимірювачів деформації в цілому. Цей тип тензометра використовує принцип інтерферометра Майкельсона з нерівною довжиною плеча, де одна точка є сенсором, лазерним джерелом і коротким плечем; а інша точка є рефлектором, розташованим на відстані вимірювання.
Пристрій перетворює зміну інтерференційних смуг, викликану рухом рефлектора, на зміщення землі. Чутливість і точність вимірювання переміщення за допомогою цього підходу прямо пропорційна довжині вимірювальної відстані. Таким чином, лазерні тензометри потребують дуже глибоких підземних установок.
Точність тензометрів може досягати однієї частки на мільярд. Таким чином, ці пристрої зазвичай використовуються для вимірювання деформації Землі або руху кори внаслідок руху розломів або вулканічної діяльності. Вони можуть вимірювати сигнали сейсмічних хвиль на дуже низьких частотах. Однак диференціальний рух землі дуже малий у порівнянні з рухом підвішеної маси відносно землі. Таким чином, тензометри не рекомендується використовувати для вимірювання рухів ґрунту, спричинених землетрусами .
Інерціальний сейсмометр
Інерціальний сейсмометр визначає параметри руху ґрунту відносно інерціального відліку, який зазвичай є підвішеною масою . Зокрема, параметри руху ґрунту відносяться до лінійної швидкості та зміщення підвішеної маси. Хоча результуючий рух ґрунту складається як з лінійних, так і з кутових компонентів, обертальний ефект від сейсмічної хвилі виявився незначним.
Ці значення швидкості та переміщення отримують від сенсорів, які перетворюють рух підвішеної маси в електричні сигнали. Механічна підвіска, яка керує рухом, залежить від сили інерції, що діє на підвішену масу. Сенсори швидкості та переміщення, а також механічна підвіска є двома основними компонентами інерціальних сейсмометрів. Розробка точних приладів для цих двох компонентів є головною у створенні сучасних інерціальних сейсмометрів.
Силометри або збалансовані акселерометри (Force-Balanced Accelerometers – FBA).
Механічна підвіска потребує невеликої сили відновлення для чутливості, щоб невеликі прискорення могли спричинити зміщення підвішеної маси. Однак, коли великі прискорення від сильного сейсмічного руху застосовуються до підвішеної маси, невелика відновлююча сила не зможе врівноважити результуючий рух.
Таким чином, пасивна механічна підвіска є точною та чутливою лише до обмеженого діапазону прискорень землі. Збалансований акселерометр усуває це обмеження, додаючи до механічної підвіски негативний зворотний зв’язок. Компенсуюча сила створюється електромагнітним перетворювачем положення підвішеної маси.
Це положення перетворюється сенсором переміщення в електричний сигнал, який проходить через блок інтегратора для створення вихідної напруги, пропорційної прискоренню землі. Динамічний діапазон FBA значно більший, ніж у сейсмометрів з пасивною механічною підвіскою. Таким чином, цей пристрій зазвичай використовується для сейсморозвідки сильного руху. Однак затримка, яка викликана зворотним зв’язком, обмежує пропускну здатність такого пристрою.
Швидкісні широкосмугові сейсмометри (Velocity Broadband або VBB Seismometers).
Сейсмічні хвилі від руху транспортних засобів і антропогенних збурень, таких як події в шахтах, мають високочастотне прискорення землі. На дуже низьких частотах незбалансована підвіска, нахил землі та теплові ефекти домінуватимуть над прискоренням землі. Таким чином, смуга пропускання для сейсмометрів, що використовують прискорення землі, обмежена певною смугою відгуку.
Смуговий відгук прискорення землі еквівалентний високочастотному відгуку швидкості землі. Таким чином, для більш широкої смуги сейсмометра сейсмічні сигнали записуються в параметрах швидкості руху землі. Сейсмометр типу VBB заснований на принципі FBA, але замість передачі прискорення зваженої маси як зворотного зв’язку використовуються її швидкість і положення. Відгук цього пристрою дуже схожий на теоретичний відгук традиційного інерціального сейсмометра, але без зниження чутливості та точності для більш широкого діапазону сил.
Геофони та мікроелектромеханічної системи або MEMS-акселерометри.
Тенденція збільшення кількості сейсмічних сенсорів спрямована на розробку мереж і масивів сейсмічних сенсорів, наприклад, для моніторингу землетрусів, розвідки нафти та стану конструкцій. Впровадження сейсмометра, його екранування та встановлення є загальними обмеженням для розповсюдження нових типів таких пристроїв.
Масове виробництво та швидке розгортання пристроїв, на які безпосередньо впливають наведені обмеження, потребують зменшення розміру тавартості сейсмометрів. Наразі існує два типи сенсорних технологій, здатних фіксувати рух землі, які є надзвичайно мініатюрними та недорогими порівняно з сейсмометрами типів FBA та VBB.
Геофони – це легкі, надійні сенсори швидкості руху, які не потребують електроенергії для роботи. Сучасні сейсмоприймачі мають магніт, закріплений на корпусі й оточений котушкою з обмоткою . Котушка з обмоткою підвішена пружинами, які дозволяють їй рухатися поперек магніту. Швидкість цього руху відносно магніту індукує вихідний сигнал напруги. На рис. 3 показано змодельовану частотну характеристику геофона у смузі 4.5 Гц. Частотна характеристика сейсмоприймача є плоскою за швидкістю для діапазону частот, що перевищує його резонансну частоту, і зменшується для частот, нижчих за цю частоту. Невеликі та недорогі геофони мають резонансні частоти, як правило, вище 4.5 Гц.

На рис. 4 наведена електрична модель з використанням механічних параметрів сейсмоприймача SM-6 у смузі 4.5 Гц .
Щоб розширити смугу частот для сейсмічного зондування, використовується подовжувач періоду. Трьома найпоширенішими методами розширення низькочастотної характеристики є інверсні фільтри, позитивний і негативний зворотний зв’язок . Інверсні фільтри
компенсують спад характеристики сейсмоприймача на частотах, нижчих за резонансну На рис. 5 показана характеристика інверсного фільтра, а також його передаточна функція. Цей метод має багато недоліків, у тому числі не досить високе відношення сигнал/шум (SNR).


Позитивний зворотний зв’язок здійснюється шляхом подачі зовнішнього струму на котушку сейсмоприймача, який чинить силу на її підвішену масу. Забезпечити стабільність фільтра позитивного зворотного зв’язку досить складно на практиці. Негативний зворотний зв’язок, на відміну від позитивного, пом’якшує призупинений рух маси всередині. Його можна реалізувати за допомогою операційного підсилювача, як показано на рис. 6.

MEMS-акселерометр є перетворювачем руху в корпусі ІМС. У типовій конструкції використовується пара конденсаторів із мікромасою кремнію з металевими пластинами посередині . Зміни положення маси призводять до змін ємності MEMS-пристрою, які перетворюються на сигнал напруги, пропорційний прискоренню підвішеної маси. Для роботи MEMS-пристроїв потрібне джерело живлення, а деякі MEMS-акселерометри мають вбудований цифровий фільтр для усунення шуму, а також мають гарну узгодженість сенсора з іншими компонентами вимірювального каналу. Як показано на рис. 7, частотна характеристика MEMS-акселерометра схожа на характеристику ФНЧ із зрізом на резонансній частоті.
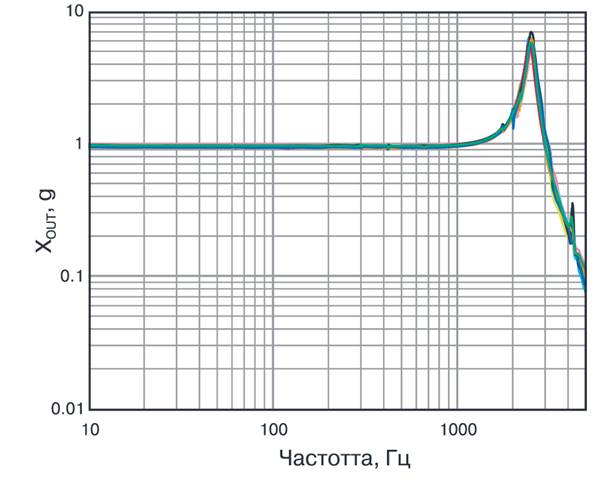
Рис. 7. Частотна характеристика MEMS-акселерометра по осі X
MEMS-акселерометри працюють краще на вищих частотах аж їх до резонансної частоти . Навпаки, геофони, завдяки своїй механічній конструкції, працюють краще на нижчих частотах, які перевищують резонансну частоту. Невеликий недорогий сейсмометр може бути реалізований на основі геофону і MEMS-акселерометру для досягнення більшої пропускної здатності пристрою. Вихідний сигнал сейсмоприймача можна перетворити на різні параметри руху ґрунту за допомогою відповідної функції передачі сенсора. У документі «Сейсмічний зондування: порівняння геофонів і акселерометрів з використанням лабораторних і польових даних» розглянуті вихідні дані геофона та MEMS-акселерометра для визначення зміщення землі на основі вейвлет-перетворення Ріккера .
Рекомендації щодо застосування сейсмічних сенсорів.
Аналіз мереж сейсмічних сенсорів необхідний для визначення повторюваності та однорідності параметрів відповідності стандартам і специфікаціям на компоненти мережі. Геологічна служба США встановила стандарт для приладів та сенсорів, які будуть розгортатися в національній сейсмічній системі (ANSS) . Далі розглядаються різні специфікації, необхідні для досягнення бажаної продуктивності сенсорів для широкого спектру застосувань на основі досвіду та технологій, відзначених Геологічною службою США.
Стандарти системи збору даних.
Геологічна служба США класифікує сучасні сейсмометри як системи збору даних. На відміну від традиційного сейсмометра, стандартна система збору даних включає сейсмічний сенсор, блок збору даних, а також периферійне та комунікаційне обладнання. Такі системи поділяються на прилади класу A, B, C і D залежно від продуктивності пристрою. Прилади класу A близькі до найсучасніших сейсмометрів, тоді як інструменти класу D можна порівняти з традиційними сейсмометрами. Отримати повну інформацію про технічні характеристики можна в Інструкції з використання таких приладів .
Пропускна здатність приладу.
Зазначена смуга пропускання та частотна характеристика сейсмічних сенсорів відрізняються для вимірів швидкості та прискорення. Чим вищий клас приладу, тим більш широка смуга частот і краща частотна характеристика. Усі широкосмугові сенсори є приладами класу А з широкою смугою пропускання щонайменше від 0.01 Гц до 50 Гц. Їх частотна характеристика плоска для швидкості в діапазоні частот від 0.033 до 50 Гц .
Короткоперіодичні сенсори класу А мають низьку смугу частот від 0.2 до 50 Гц. Їх частотна характеристика плоска для швидкості лише в діапазоні частот від 1 до 35 Гц . Акселерометри класу A мають плоску частотну характеристику в діапазоні від 0.02 до 50 Гц, тоді як акселерометри класу B мають плоску частотну характеристику лише в діапазоні від 0.1 до 35 Гц .
Сенсори сильного руху, слабкого руху та широкосмугові сенсори.
Сенсори, які використовуються в системах збору даних, класифікуються за амплітудою та частотним діапазоном сейсмічних сигналів. Сенсори сильного руху вимірюють сейсмічні сигнали великої амплітуди і зазвичай є акселерометрами. Акселерометри сильного руху можуть вимірювати до 3.5 g із системним рівнем шуму менше 1 мкг/\Тц . Сенсори слабого руху можуть вимірювати сейсмічні сигнали дуже низької амплітуди з рівнем шуму менше 1 нг/лГц . Однак широкосмугові сенсори зараз вже здатні вимірювати сейсмічні сигнали низької амплітуди; отже, сенсори слабого руху на практиці використовуються рідко.
Динамічний діапазон сенсорів.
Широкосмугові сенсори швидкості мають чутливість 1500 В/м/с. Для максимальної вихідної напруги ±20 В максимальна вимірювана швидкість становить ±0.013 м/с . Короткоперіодичні сенсори швидкості більш чутливі, ніж широкосмугові сенсори в меншому діапазоні частот. Рівень чутливості зазвичай становить ±0.01 м/с при частоті сигналу 1 Гц . Рівень фіксації для акселерометрів класу A перевищує ±3.5 g, тоді як для акселерометрів класу B він становить ±2.5 g . Динамічний діапазон сенсору – це відношення найбільшого вимірюваного середньоквадра- тичного значення сейсмічного сигналу до серед- ньоквадратичного власного шуму. Однак серед- ньоквадратичне значення власного шуму сенсору змінюється вздовж його смуги пропускання.
У табл. 2, 3 наведено динамічний діапазон різних сейсмічних сенсорів для різних діапазонів частот.
Таблиця 2. Динамічний діапазон різних широкосмугових сейсмічних сенсорів
| Частотний діапазон, Гц | Динамічний діапазон, дБ |
| 0.01 – 0.05 | 131 |
| 1 – 10 | 126 |
| 10 – 15 | 116 |
Таблиця 3. Динамічний діапазон різних короткоперіодичних сейсмічних сенсорів
| Частотний діапазон, Гц | Динамічний діапазон, дБ | |
| Клас A | Клас B | |
| 0.02 – 2 | 145 | — |
| 2 – 50 | 130 | — |
| 0.1 – 35 | — | 87.3 |
Канали датчиків і їх орієнтація.
Компоненти лінійного руху ґрунту внаслідок сейсмічних хвиль присутні на всіх трьох декартових осях. Традиційна стандартна орієнтація тривісних сейсмічних сенсорів – на схід, північ і вгору. Однак конструкція традиційних і навіть деяких сучасних сейсмометрів відрізняється для горизонтальних і вертикальних сенсорів, оскільки вертикальні сенсори повинні враховувати гравітаційні ефекти. Однорідне тривісне розташування дозволяє використовувати сенсори подібної конструкції для визначення лінійних компонентів руху ґрунту на декартових осях . Сенсори розташовуються в трьох рівновіддалених точках по колу навколо центру приладу та нахилені до нього під кутом 54.7 від вертикалі. Модифікований набір осей можна повернути до декартових осей за допомогою рівняння (4), яке являє собою матрицю для перетворення однорідного тривісного розташування, в декартову систему координат.
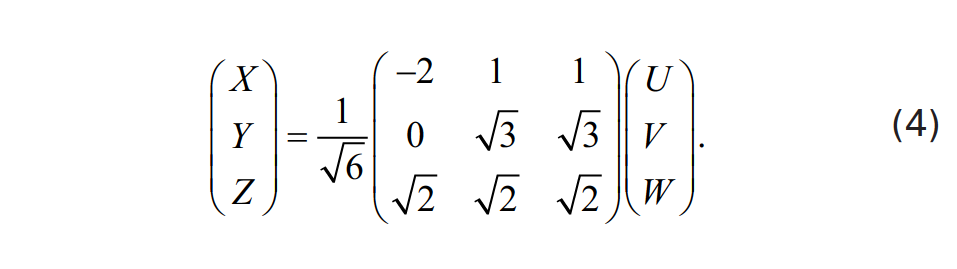
Більшість сучасних сенсорів, як правило, сконструйовані для тривісних вимірювань. Ці сенсори мають притаманний міжосьовий зв’язок у дуже малих градусах. Рекомендації щодо приладів вимагають, щоб міжосьовий зв’язок був меншим за 70 дБ вихідного сигналу .
Роздільна здатність і частота дискретизації.
Рухи землі в результаті землетрусів можуть мати дуже малі амплітуди на дуже низьких частотах. Реєстратори даних, які використовуються для сейсмічних приладів, здатні записувати сигнали з різними частотами дискретизації та високою роздільною здатністю. Широкосмугові сейсмометри потребують принаймні 20-розрядної роздільної здатності даних із частотою дискретизації від 0.1 вибірки за секунду до 200 вибірок.
Короткоперіодичні сенсори швидкості та акселерометри класу A потребують принаймні 22-розряд- ної роздільної здатності даних із частотою дискретизації від 1 вибірки за секунду до 200 вибірок. Акселерометри класу B мають нижчі вимоги до роздільної здатності принаймні 16 розрядів даних . Специфікації щодо частот дискретизації відносяться до приладів з внутрішнім накопичувачем даних. Однак вдосконалені сейсмометри оснащені більшим обсягом пам’яті, та мають доступ до великих мережевих даних, таких як хмарні сервіси даних, і, таким чином, можуть підтримувати частоту дискретизації, яка перевищує номінальний параметр специфікації. Це дозволяє більш точно аналізувати дані та проводити сейсмічні дослідження.
Інформація про час і місцезнаходження.
Сейсмічні сигнали мають відношення лише до конкретного місця та часу вимірювання. Стандартом для кожного сейсмічного приладу є наявність даних із мітками часу з відомим глобальним розташуванням або положенням. Вимогою до кожного сейсмічного приладу є можливість фіксувати своє місцезнаходження для кожного запису за допомогою введення користувачем вручну або через пристрій чи службу GPS. Сучасні сейсмометри також мають або вбудований годинник реального часу, або можуть синхронізуватися з точним еталонним часом, наприклад, через мережевий сервер протоколу часу.
Формат вихідних даних.
Існує два відомі формати даних, які використовуються сейсмічними інструментами в усьому світі: SEG-Y і SEED. Формат SEG-Y – це відкритий стандарт, розроблений Товариством дослідницьких геофізиків (SEG) для обробки геофізичних даних, таких як тривимірні сейсмічні сигнали . Кожен запис містить мітки часу, інтервали вибірки та розташування в координатах фактичного вимірювання.
Варто зазначити, що існує різноманітне програмне забезпечення з відкритим вихідним кодом для сейсмічного аналізу, яке використовує формат SEG-Y, але більшість, як правило, не дотримується точних специфікацій. Формат стандарту для обміну даними землетрусів SEED розроблений для простоти та точності обміну необробленими сейсмічними даними між установами та між приладами. Хоча він в основному використовується для архівування сейсмічних записів, різні версії SEED, такі як miniSEED і SEED баз даних використовуються для аналізу та обробки даних.
Формат miniSEED містить лише дані про хвилі, тоді як формат SEED без даних містить інформацію про сейсмічний прилад і станцію. Сучасні зміни в традиційній конструкції сейсмометрів спрямовані на швидке розгортання та впровадження сейсмічних мереж, особливо для міських і структурних станціймоніторингу. Сучасні дистанційні прилади повинні відповідати поточним інструкціям щодо приладів, щоб вимірювання сейсмічних сигналів відповідали встановленим стандартам даних. Однак вартість і розмір реалізації повинні бути значно меншими.
Використання невеликих геофонів і MEMS-акселерометрів як сенсорів руху землі в поєднанні з високопродуктивним АЦП і цифровим сигнальним процесором DSP є, на погляд авторів, оптимальним рішенням . Основним компонентом збору сейсмічних даних є АЦП. Традиційно така система збору даних, яка є польовою, містить порозрядний АЦП з підсилювачем, рис. 8.
Слід відзначити, що дискретна реалізація попереднього підсилювача PA, фільтра низьких частот, фільтра високих частот, режекторного фільтра NF, фільтр захисту від накладання спектрів AA і підсилювача IFP сприятиме досить великому системному шуму та додасть споживання електроенергії. Використання мультиплексора додає перехресні перешкоди та гармонійні спотворення. Найважливішим є те, що похибка квантування АЦП обмежує динамічний діапазон і роздільну здатність системи.
Таким чином, краще проєктувати таку систему на базі альтернативної архітектури з іншим типом АЦП, наприклад, сигма-дельта АЦП. Сигма-дельта АЦП зменшує похибку квантування, притаманну пороз- рядному АЦП, і призводить до вищої роздільної здатності та більшого динамічного діапазону. З сучасними сигма-дельта АЦП не потрібні дискретні фільтри. Сигма-дельта АЦП містить настроювані цифрові фільтри, які виконують функції традиційного сигнального ланцюга. Це ефективно знижує рівень системного шуму. Крім того, прецизійні сигма-дельта АЦП високого класу мають декілька каналів із принаймні 24-розрядною роздільною здатністю. Сучасна схема вимірювального каналу на основі сигма-дельта АЦП для сейсмічних сенсорів наведена на рис. 9.
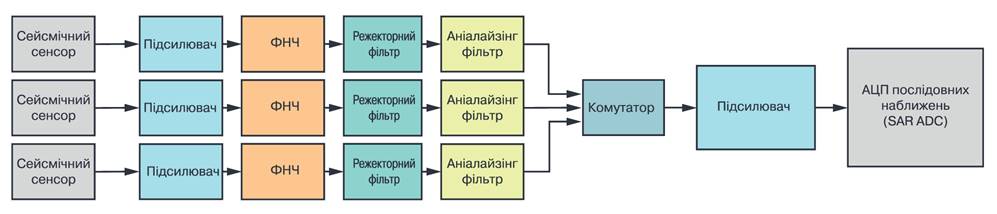
Рис. 8. Структурна схема традиційної системи збору даних

Така схема реалізована на базі ІМС трьохоснихMEMS-акселерометрів з вбудованим 20-розряд- ним АЦП, який можна підключити безпосередньо до процесора. Недорогі компактні геофони сприймають лише один сигнал із резонансною частотою, як правило, вищою за 4.5 Гц і чутливістю понад 25 В/м/с. Тривісне розташування дозволяє об’єднати три подібні одноканальні сейсмоприймачі в тривісний наземний сенсор. Розширювач періоду потрібен для розширення смуги пропускання сейсмоприймача в область нижчих частот для досягнення стандартних характеристик приладу широкосмугових сенсорів. Якщо він призначений для роботи з одним джерелом живлення, розширювач періоду виконує функцію підсилювача, а також зміщує дво- полярний вхідний сигнал.
Власна частотна характеристика MEMS-акселерометрів робить їх вразливими до дрейфу зсуву та високочастотного шуму. Смугові фільтри покращують сейсмічний сигнал прискорення в заданому частотному діапазоні. Для подовжувача періоду геофона і смугового фільтра акселерометра потрібні прецизійні операційні підсилювачі з низьким рівнем шуму, низькою напругою зміщення та низьким вхідним струмом зсуву.
Опорна напруга відповідає за діапазон АЦП і за коливання вихідного сигналу розширювача періоду. Рівень опорної напруги має враховувати коливання напруги трьох сигналів прискорення, якщо використовується сенсор з аналоговим виходом. Необхідно, щоб опорна напруга мала низький температурний дрейф, особливо для зовнішньої установки в умовах від 0 до 50 °C.
Джерело живлення сейсмічного сенсора може забезпечуватися від перетворювача постійного струму, наприклад, у будівлях і станціях, або від батареї для віддалених і польових сейсмосенсорів. У випадку застосування джерела постійного струмувикористовуються стабілізатори з низьким рівнем шуму типу LDO. Для виробів з живленням від акумулятора потрібен зарядний пристрій з контролером заряду для підтримки роботи приладу протягом тривалого часу без обслуговування. Крім того, бажано, щоб такий прилад був здатний збирати енергію з легкодоступних джерел, таких як сонячна або теплова енергія. Для цього можна використати схему, яка відстежує точки максимальної потужності та режими гістерезису, щоб забезпечити найбільшу ефективність передачі енергії.
Шестиканальний сигма-дельта АЦП приймає три сигнали швидкості каналу від розширювача періоду та ще три сигнали прискорення, якщо використовується аналоговий вихідний MEMS-акселерометр. Кожен сигнал прискорення та швидкості має бути відібраний із частотою дискретизації щонайменше 1.2 кГц. Аналіз сейсмічних сигналів сприяє пере- дискретизації кожного каналу. Таким чином, частота дискретизації АЦП повинна бути набагато вищою за 1.2 кГц. Сигма-дельта АЦП із можливістю одночасної дискретизації усуває потребу у підвищенні частоти дискретизації.
У такій системі процесор виконує функції реєстратора даних, який перетворює та зберігає сейсмічні дані з усіх каналів у стандартному форматі SEED або SEG-Y і надсилає їх у віддалений обчислювальний центр. Оскільки ця система має невисокі вимоги до обробки даних, можна використовувати мікро- контролер малої потужності типу ARM® Cortex®-M4 із наднизьким енергоспоживанням, рекомендований для додатків Інтернету речей. В режимі низького споживання його струм становить 650 нА, у режимі сну – 200 нА.
Для автономних приладів із вбудованим аналізом даних процесор DSP обчислює сейсмічні характеристики та інші параметри, наприклад, індикатористану будівлі в режимі моніторингу. Аналіз сейсмічних даних вимагає обчислення різних математичних і статистичних функцій. Наприклад, для обчислення сейсмічної інтенсивності потрібні логарифмічні функції та вікно пікового виявлення для прискорення та швидкості. Крім того, час обробки має бути достатньо малим для виконання безперервної вибірки та обробки даних. Дані про місцезнаходження приладу можна отримати з модуля GPS або встановити вручну під час розгортання системи моніторингу.
Для даних часу недорогий DSP може використовувати або свій внутрішній периферійний пристрій RTC, або мережний NTP-протокол. Існує кілька варіантів інтерфейсу даних. Прилад може використовувати промисловий RS-485 для дротового зв’язку, особливо всередині будівель, або інтерфейс Ethernet для підключення пристрою до існуючої мережі передачі даних. Для бездротового зв’язку прилад може використовувати пристрої Wi-Fi або SmartMesh® IP33 для повної надійності даних у динамічному середовищі .
Надійність зібраних сейсмічних даних підвищується, оскільки збільшується кількість сейсмічних сенсорів, розміщених у різних місцях. З сейсмічних даних можна отримати багато інформації, яка є корисною для широкого спектру застосувань, таких як моніторинг стану конструкцій, геофізичні дослідження, розвідка нафти та навіть промислова та побутова безпека. Далі розглянемо три поширені застосування мереж сейсмічних сенсорів.
Розподілені сейсмічні мережі.
Засоби досліджень у вулканології та сейсмології потребують розгортання сейсмічних сенсорів на складній і іноді небезпечній місцевості . Для моніторингу внутрішніх процесів у вулканах необхідно відстежувати рух землі в кількох точках. Ці місця можуть бути небезпечними після певних фаз вулканічної активності, що може призвести до виходу зі строю сейсмічного сенсору. Недорогі сейсмічні сенсори малої потужності дають можливість зменшать витрати на дослідження та водночас залишаються активними протягом тривалого часу. Ще одне подібне застосування – це характеристика руху плити, яка вимагає великої кількості сейсмічних сенсорів, розташованих уздовж лінії розлому.
Система раннього попередження про землетрус.
S-хвилі та поверхневі хвилі, які є більш руйнівними типами сейсмічних хвиль і які є частиною землетрусу, поширюються повільніше, ніж найменш руйнівна P-хвиля. Таким чином, можливо запровадити систему раннього попередження землетрусів шляхом виявлення ранніх ознак виникнення цих хвиль. Сейсмічні системи, як правило, мають короткий час для запобігання руйнівним наслідкам від землетрусу.
Житлові та промислові споруди, завдяки своєчасному попередженню, зможуть відключити електричні системи та газопроводи за мить до початку інтенсивних поштовхів землі. Використання мережі сейсмічних сенсорів, розгорнутої в кількох місцях навколо захищеної території, допоможе збільшити відповідний час реакції. Крім того, будуть зведені до мінімуму помилкові тривоги, спричинені неземлетрусними джерелами. На рис. 10 наведено можливе налаштування системи раннього попередження про землетрус, яка захищає певну територію чи споруду.
Час відгуку системи раннього попередження пропорційний радіальній відстані сейсмічного сенсора від захищеної конструкції відповідно до рівняння (5). Враховуючи, що P-хвилі поширюються зі швидкістю 5.6 км/с, а S-хвилі руху зі швидкістю 3.2 км/с, можна підрахувати, що одна секунда часу відгуку додається на кожні 7.51 км відстані сейсмічного сенсора від захищеної зони. Крім того, розміщення кількох сейсмічних сенсорів із меншими інтервалами забезпечить кращу роздільну здатність за часом відгуку. Рівняння (5) показує залежність часу відгуку системи раннього попередження та радіальної відстані сейсмічного сенсора від зони захисту.
dradial= tresponse х (7.51 км/с), (5)
де dradial – радіальна відстань сейсмічного сенсора від зони захисту, tresponse – дозволений час відгуку в секундах.
Моніторинг стану будівлі. Сейсмічна безпека будівель може бути покращена шляхом моніторингу та моделюванням його реакції за допомогою примусових вібраційних випробувань. Встановлення сейсмічних сенсорів у будівлі допоможе в оцінці збитку після землетрусу, та його відновленні. У випадках масштабних пошкоджень широко розповсюджена мережа сейсмічних сенсорів може виявити структурно пошкоджені ділянки, тим самим зменшуючи ризик і вартість візуального огляду. Дослідження 32 сейсмічних сенсорі на основі акселерометрів сильного руху було виконано на базі 20-поверхової сталевої будівлі MRF Atwood. Сенсори розміщалися на 10 рівнях для точного моніторингу структурного стану будівлі. Результати таких досліджень наведені в .
")
ВИСНОВКИ
Мережі сейсмічних сенсорів мають широкий спектр застосувань у промислових технологіях, сейсмологічних дослідженнях і моніторингу стану різних конструкцій. Поширений попит на їх застосування змінив вимоги до сенсорів і систем сейсмометрів на користь віддалених систем з низькими експлуатаційними витратами. Сучасна недорога технологія зондування землі здатна проводити вимірювання на рівні з традиційними інструментами. Використовуючи широкий спектр сучасних ІМС від кращих світових виробників, можна реалізувати сенсорні пристрої та системи для різних застосувань сейсмічного зондування. Сейсмічні хвилі від руху транспортних засобів і антропогенних збурень, таких як події в шахтах, або в умовах бойових дій, які викликають масштабні пошкодження складних ін- фраструктурних об’єктів – електростанцій, промислових будівель, нафтопереробних заводів і т. і., можуть бути виявлені і навіть прогнозовані широко розповсюдженою мережею сейсмічних сенсорів, тим самим зменшуючи ризик персоналу і знижуючи вартість візуального огляду таких об’єктів.